- Ремонт электросамокатов — популярные неисправности и их устранение
- Почему ломаются самокаты с электродвигателями
- Часто встречающиеся неисправности
- Решение проблем
- Все про контроллеры электросамоката | Схема, проверка, ремонт
- Принцип работы контроллера
- Схема подключения и распиновка контроллера электросамоката
- Двигатель и контроллер для электросамоката своими руками
Ремонт электросамокатов — популярные неисправности и их устранение

За несколько лет электросамокаты из игрушки для подростков превратились в популярный вид транспорта для различных категорий пользователей. Сегодня на самокатах, оснащенных электродвигателями, можно увидеть не только школьников и студентов, но и офисных работников, не желающих терять время в автомобильных пробках.
Данный вид электротранспорта стал отличным выбором людей, живущих вдалеке от остановок общественного транспорта, поскольку электросамокату можно быстро придать компактный вид и вместе с ним продолжить поездку на автобусе или троллейбусе. В продаже имеется огромное количество моделей самокатов на электротяге, выпущенных различными производителями.
Почему ломаются самокаты с электродвигателями
Имея возможность выбора, большинство покупателей приобретают качественное транспортное средство, отличающееся не только привлекательными ходовыми характеристиками, но и надежной конструкцией. Ведущие производители гарантируют долговечность своих изделий, однако, любая техника может выйти из строя.
Среди причин появления неисправностей может быть естественный износ комплектующих, неправильная эксплуатация, а также механические повреждения устройства, возникающие в аварийных ситуациях. Иногда ремонт электросамоката можно выполнить своими руками, если его владелец сможет определить причину поломки, а также обладает необходимыми навыками для ее устранения.
Поэтому лучше воспользоваться предложениями сервисных центров, где имеется все необходимое оборудование. Если же у электротранспорта еще не закончился срок гарантийного обслуживания, то обращение к профессионалам обязательно.

Часто встречающиеся неисправности
Некоторых повреждений самоката с электродвигателем можно избежать, если бережно к нему относиться. Причиной многих поломок становится пренебрежение основными правилами эксплуатации электротранспорта.
Даже если производители позаботились о защите электрооборудования устройства от попадания влаги, не стоит рисковать, совершая прогулки под дождем. Такие путешествия могут стать необходимостью срочной замены важнейших элементов электросамоката.
Наиболее часто в процессе эксплуатации появляются следующие проблемы:
- потеря контактов в местах соединения элементов устройства из-за их окисления. Это происходит при попадании влаги или возникновению конденсата при резких температурных перепадах;
- выходит из строя аккумулятор. Основными причинами могут быть неправильная эксплуатация, либо закончивший срок его работы;
- блок управления (контроллер) может выйти из строя при перегрузке устройства, то есть несоответствие его параметров мощности электрооборудования. Встречаются также случаи заводского брака.
Среди неисправностей, не связанных с электрооборудованием, чаще всего возникает необходимость ремонта или замены шин, ремонт рулевой колонки или ее замена из-за трещины, появившейся в результате падения. Иногда неправильная регулировка тормозов становится причиной их некорректной работы.
Решение проблем
Наиболее просто определяется неисправность аккумулятора. Обычно неисправная батарея либо не заряжается за необходимое для зарядки время, либо заряжается слишком быстро, но заряда хватает лишь на короткое время. Такой аккумулятор следует заменить на новую АКБ.
Однако плохой контакт часто приводит к неисправности других элементов контроллера, поэтому лучше сразу заменить новым устройством. При выборе нового контроллера необходимо соответствие его параметров ранее установленной детали. При замене подключение должно выполняться по схеме, нанесенной на контроллер.
Если вышел из строя электродвигатель, то отремонтировать его лучше в мастерской. Поскольку в современных электросамокатах обычно используется двигатель типа «мотор-колесо», то замену реально выполнить самостоятельно.
Источник
Все про контроллеры электросамоката | Схема, проверка, ремонт
Электросамокат отличается от обычного самоката наличием дополнительных компонентов. Главные из них – встроенный в колесо бесколлекторный электродвигатель, аккумуляторная батарея и контроллер. Аккумуляторная батарея обеспечивает автономное питание мотора, а коллектор отвечает за его корректное управление и контроль работы. Среди представленных в продаже электронных компонентов есть масса готовых решений, позволяющих снабдить электроприводом как самокат, так и другие виды персонального транспорта.
Предшественники современных контроллеров напоминали массивный реостат. Теперь они компактны, не имеют движущихся элементов и регулируют передачу электроэнергии к двигателю в зависимости от длительности поступающих импульсов. Контроль и управление электросамокатом производится при помощи пульта, закрепленного на руле. Обычно на пульте есть рычаги или кнопки для включения питания и фар, выбора режимов и скорости езды.
На дисплее может отображаться текущая скорость, уровень заряда батареи, пробег и другая информация. При отсутствии дисплея минимальную информацию о работе устройства могут предоставлять светодиодные индикаторы. Многие современные электросамокаты интегрируются со смартфонами, которые берут на себя функции дисплея и пульта управления.
Принцип работы контроллера
Первостепенная задача этого элемента – подавать на электромотор энергию, получаемую от аккумуляторной батареи. Проходящий по обмоткам ток создает магнитное поле, которое взаимодействует с находящимися в мотор-колесе магнитами ротора. В результате колесо приводится в движение, причем частотой вращения управляет контроллер. Принцип работы контроллера электросамоката таков: он принимает сигнал от ручки газа и с учетом продолжительности поступающих импульсов регулирует скорость вращения мотора.
Кроме основной задачи, этот контролирующий и управляющий элемент:
- регулирует скорость вращения электромотора;
- управляет крутящим моментом;
- обеспечивает плавное и мягкое торможение при помощи изменения продолжительности импульсов;
- защищает электродвигатель;
- не допускает глубокой разрядки батареи – выясняет напряжение АКБ и при его критическом снижении отключает мотор от питания;
- при помощи встроенного термодатчика отслеживает температуру и не допускает токовых перегрузок.
Схема подключения и распиновка контроллера электросамоката
К контроллеру подсоединяется электромотор и остальные электрокомпоненты самоката. Для их подключения используются многожильные соединительные провода в термостойкой изоляции из силикона. Совместимость контроллера с электродвигателем и АКБ электросамоката определяется по максимальному току, напряжению батареи и другим рабочим параметрам.
Рассмотрим схему подключения контроллера электросамоката и функции контактов на примере устройства, разработанного для управления трехфазными электромоторами с рабочими параметрами 36 В и 350 Вт. В таблице приведен перечень электрических разъемов контроллера, их назначение и цвета изоляционного покрытия используемых в них проводов.
Подключение к ручкам тормоза и стоп-сигналу. К общему жгуту проводов подключено 2 разъема.
Источник
Двигатель и контроллер для электросамоката своими руками
В этой статье я расскажу как в домашних условиях сделать мощный двигатель для самоката или детского электромобиля с высоким КПД и простой контроллер к нему.
Вот что в итоге получилось: двигатель описанный в статье ниже без изменений, добавил регулируемый источник питания и курок газа, маленькая батарея в сумочке на руле 8S1P 2,5 А·ч (быстро заменяемая, можно брать несколько с собой, одной такой батареи хватает на 9-12км на средней скорости)

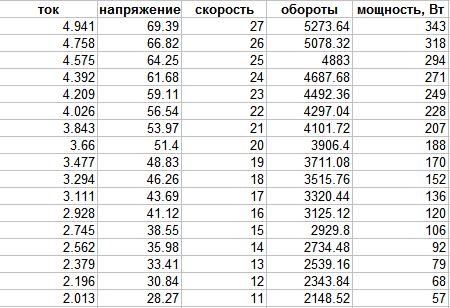
Расход батареи зависит от скорости, прилагаю таблицу расхода энергии для моего веса 85 кг:
Контроллер сейчас полный мост 4 транзистора IRFB4110 установленных без радиаторов, регулируемый источник питания выдает на этот мост напряжение от 25 до 70В при 24-33В на входе с кпд более 93%. Общий кпд системы получился на уровне 80-85% (включая потери на батарее проводах контроллере и двигателе).
Samsung INR18650-25R = 87 Вт/час (42В максимум с отводом от середины, 2.5 А/ч) мне полного заряда хватает на
15 км по ровной дороге.
Изначально использовался 1 датчик холла (но я уже тогда знал что это большие потери так как делал такие двигатели и раньше), так двигатель на холостом ходу потреблял 42 Вт (1 А на каждую половину батареи, итого 2*21 или 1*42) и за 2 минуты нагревался до 50 градусов (это без нагрузки), установка 2х датчиков холла снизила ток холостого хода в 10 раз! и он составил 100 мА (4,2 Вт) и греться он перестал. На максимальной нагрузке (езда в горку) ток достигал 6 ампер (>250 Вт) и обмотка разогревалась так что больше пары минут нельзя было ездить а после установки 2х датчиков холла и подачи питания на обмотки только в нужные моменты, согласно рисунку выше, полностью решило проблему перегрева (значительно подняло кпд) и ток при заезде на ту же горку упал в 2 раза (130 Вт)
И так магниты с катушками запакованы в корпус, вал (болт М6 100мм на котором гайками с бортиком, зажимные для колес, через шайбу и резиновую прокладку зафиксирован магнит) закреплен в немагнитных стальных подшипниках (это в идеале, но я использовал обычные дешевые стальные но сила магнитного поля такая что крутятся они с трудом, поэтому лучше сразу нержавейку ставить) и самое главное как его теперь запустить. Я использовал самый простой вариант одна катушка и один магнит — самый дешевый вариант и для самоката подходит идеально, естественно так как запитываем только 90 — 120 градусов сектор на такт то остается незаполненные тягой сектора и стартовать такой двигатель будет с толчка, но это же не вентилятор а двигатель для самоката, оттолкнулся, включил двигатель и поехал, все просто. Если же нужен автопуск то минимум нужно делать 2х фазный 4х тактный, такой поставил в детском автомобиле.
Контроллер
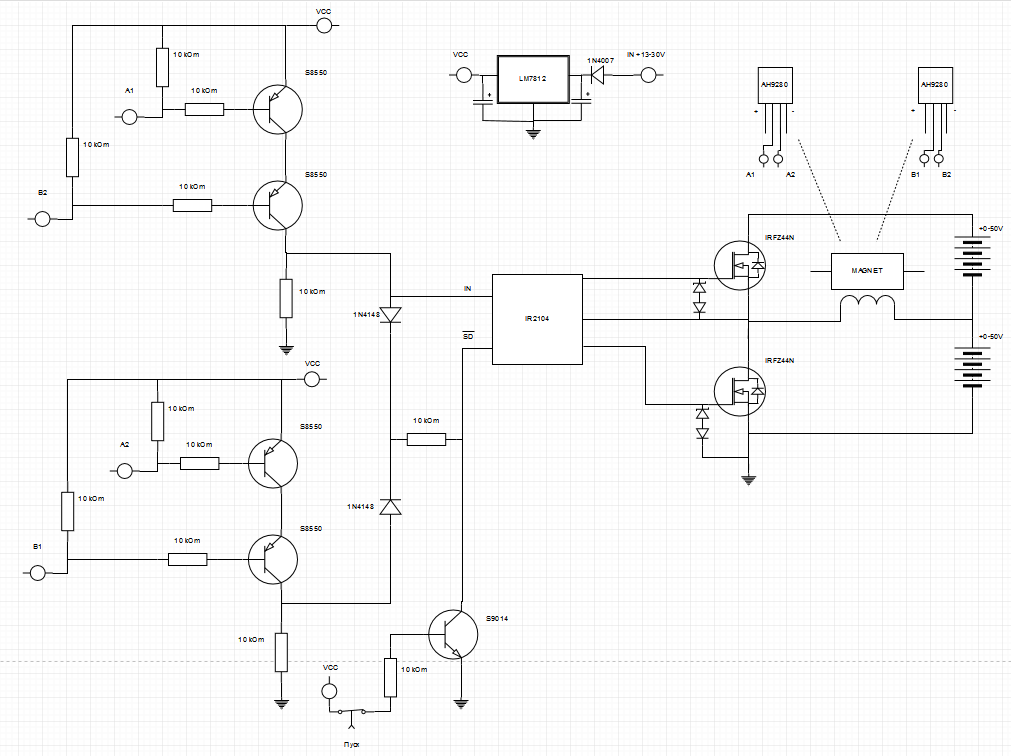
Фраза «шим регуляция» у меня ассоциируется с потерями, запитывать нужно постоянным током чтобы избежать потерь переключения на ключах и не греть диоды в ключах, в общем контроллер может работать с кпд 97% и выше если забыть про шим, а скорость лучше регулировать напряжением питания (например у меня в самокате она фиксированная 13 — 18 км/ч в зависимости от веса ездока). Запитка обмотки двумя тактами возможна или мостом но тогда потери всегда на 2х ключах или полумостом с питанием с отводом от средней точки, выбран именно такой вариант так как в 2 раза уменьшает потери на ключах (всегда катушка включена только через 1 ключ). Еще из плюсов такого полумоста то что обратная эдс при отключении катушки сливается через 1 диод в противоположное плечо и потери на диодах тоже в 2 раза меньше то-есть больше энергии вернется в конденсатор / аккумулятор так же и с рекуперации от скатывания с горки. В итоге получаем полумост + драйвер полумоста + схема управления.
Схема управления
Использование одного датчика хола не дает возможность управлять углом в котором запитывается обмотка, поэтому нужно минимум 2 датчика расположенные таким образом чтоб получать включение обмоток в нужном диапазоне, проще всего сделать угол 90 град (для этого нужно разнести датчики на 45 градусов от витков катушки в обе стороны) тогда пары датчиков хватит на 4 такта (используем только 2 из них для однофазного) . Каждый датчик возвращает 2 позиции которые означают видит ли он северный или южный полюс, так вот когда оба видят северный включаем один ключ, когда оба видят южный второй, при использовании микросхем от куллера — реализуется логикой 2или-не, на входы двух логических элементов подается питание через сопротивления на выходах при этом 0, микросхемы куллера коммутируют входы логических элементов на ноль, когда оба входа на нуле на выходе 1 — включается 1 ключ, и так же когда на втором логическом элементе оба входа на нуле включается другой ключ. Все просто. Учитывайте при выборе микросхемы драйвера куллера (датчик холла) что они есть с защитой от остановки и без, для двигателя поддержки как у меня на самокате лучше использовать с защитой он запустится только при начале езды, но для двигателя который должен стартовать сам нужно выбирать без защиты и делать ее если необходима другим способом (защита от перегрузки по току например).
Микросхем логики у меня не было потому заменил транзисторами. Схема подключения драйвера мосфетов по даташиту.
Отладка двигателя
Хочу отметить важные моменты которые уберегут детали контроллера от случайного выжигания. Дело в том что обратная эдс с катушки очень коварная штука, она может спалить всю электронику и драйвер и микросхемы с датчиком холла. Для предотвращения таких ситуаций обязательно должны стоять конденсаторы по входу питания в которые сливается обратная эдс с катушки (через защитные диоды в мосфетах) при случайном отключении батареи, минимум 1000 мкф 50В с низким esr. Также для предотвращения попадания выбросов высокого напряжения на выход драйвера через обратную емкость мосфета, обязательно в цепи затвор исток должен стоять стабилитрон на 13-15В (что ниже допустимого напряжения затвора 20В но выше управляющего напряжения с драйвера 12В).
При первом включении обмотку лучше подключать через сопротивление ограничивающее максимальный ток (10-50 Ом), переворотом датчиков холла добиваемся вращения в нужную сторону. Также перемещая датчики можно найти позиции где потребление на холостом ходу будет минимальным и работа двигателя тихой. Сильно уменьшать угол запитки не стоит ( Samsung INR18650-25R = 38$
Итого, электрификация самоката обошлась в
Плюсы и минусы
Плюсы:
- двигатель вращается без какого либо сопротивления, что не мешает поездке на самокате как на обычном при отключенном питании
- малый вес
- цена
- высокая эффективность
Минусы:
- нельзя устанавливать такой двигатель вблизи магнитных материалов (приведет к залипанию ротора, использование в корпусе железных болтов тоже недопустимо, только нержавейка или клей)
- нельзя устанавливать очень близко с массивными токопроводящими материалами (торможение вихревыми токами, идеально использовать раму из пластика, дерева, карбона тогда можно ставить где угодно)
- придумайте и напишите в комментариях (низкая скорость не катит, можно поднять напряжение, меня устраивает скорость для езды по пешеходным дорожкам)
Больше фото
Прижатие ремня для большего сцепления с зубчатым колесом

Первые включения (еще с 1 датчиком холла и пониженным напряжением питания 2х8В) максимальная скорость 3-5 км/ч

Настройка положения датчиков (катаемся, меряем потребление, переклеиваем датчик холла ищем оптимальный вариант) на фото оптимальный
Источник