- РАЗВОД НА РЕМОНТ
- Ремонт и профилактика шагового двигателя
- Шаговый двигатель (Step motor)
- Производители шаговых двигателей
- Драйвер шагового двигателя (Stepper driver)
- Ремонт шагового двигателя и драйвера ш.д. в сервисном центре
- Подключение шагового двигателя, настройка и программирование
- Как чинить шаговый двигатель от подклинивания.
- Подпишитесь на автора
- Подпишитесь на автора
- Еще больше интересных постов
- Фотополимерный принтер Anycubic Photon Mono X. Часть первая «ЭКРАН». Черный день 3Д печатника.
- Подпишитесь на автора
- Подробная инструкция по восстановлению btt skr 1.3. LPC1768
- Подпишитесь на автора
- Blue Pill & SSD1306, ну очень маленькие. но 32 бит!
- Подпишитесь на автора
- Комментарии
- Изучаем миниатюрный шаговый двигатель
- Знакомство
- Эксперимент №1. L293D + ATtiny44
- Полношаговый режим. Одна фаза
- Полношаговый режим. Две фазы
- Эксперимент №2. TMC2208 + ATtiny44
- Эксперимент №3. ATtiny44-драйвер
- Отбросим все предосторожности
- Выводы
РАЗВОД НА РЕМОНТ
Ремонт и профилактика шагового двигателя
Шаговый двигатель многим кажется нерарешимой загадкой и не зря. Его капризный нрав заставит оказаться в неловком положении любого уважающего себя электрика. Сейчас я хочу рассмотреть элементарные моменты эксплуатации шагового двигателя, без которых на мой взгляд невозможно достойно сделать простую профилактику этой электрической машине. Ротор этого двигателя представляет собой сильно намагниченный цилиндр с ярко выраженным профилем в продольном исполнении. В таком же стиле выполнен профиль статора. Соответственно в работе этого двигателя фиксация равнодействующего магнитного поля играет решающую роль. Но речь не о теории, а о практике. Зазоры в двигателе выполнены с минимальными возможными припусками и малейшее отклонение вызывает нарушение его работы.

Что же может стать возмутителем спокойствия, вернее нормальной работы? Да хотя бы куссочек технологтческой стружки от обработки самого двигателя. Прежде, чем начать разборку двигателя, необходимо создать для этого условия:
1.Чем меньше двигатель по размерам, тем они должны быть жёсче.
2.Должна быть идеальная чистота на рабочем месте, какую только Вы можете себе представить.
3.Должен быть идеально чистым инструмент, которым Вы собраетесь работать и его наличие, о чём нужно позаботиться заранее.
4.Должны быть в наличии к примеру два-три полиэтиленовых пакета подходящих размеров и чистая обёрточная бумага. Все тряпки необходимо убрать.
5.Самое трудное, что нужно обеспечить, так это наличие сжатого воздуха давлением примерно 6 атм.
Вот такие нехитрые требования, которые могут привести Вас к положительному результату. Обычно торцевые крышки шаговых двигателей выполняются из немагнитных материалов, да ещё используются всевозможные сальники и всё для того, чтобы обеспечить внутри идеальную возможную чистоту. Поэтому начинать разборку двигателя лучше всего вдвоём, чтобы ненароком не расколоть торцевые крышки и не уронить двигатель на пол.

Снятая задняя крышка
Допустим, Вы отвинтили штыри, вынули их, сняли крышки.

Снятая передняя крышка
Как вытащить ротор? Дело в том, что только стоит снять переднюю крышку, как он мгновенно прилипает к статору, причём казалось бы намертво. Вот тут нужны достаточно опытные и крепкие человеческие руки. Как вариант предлагаю подложить полиэтиленовый пакет на колени, взять ладонями за корпус двигателя и опереться между ног. Со стороны задней крышки через выколотку, (если есть, латунную) несильными ударами молотка второй учаастник должен выбить ротор вниз. Он пойдёт постепенно и сразу его зворачивайте в полиэтиленовый пакет. Даже соприкосновеное с одеждой чревато неприятными последствиями.

Вид на ротор при вытаскивании из статора шагового двигателя
Затем необходимо тчательно проверить поверхность ротора:

Вид ротора для осмотра и чистки
и статора на наличие посторонних частичек , особенно металла:

Статор шагового двигателя
В данном случае причиной разборки шагового двигателя явилось проявление продольного люфта ротора двигателя, потеря его мощности и появление резонанса при вращении с нагрузкой. Как выяснилось в дальнейшем, лопнуло опорное пружинное кольцо в задней части двигателя.

Старое лопнувшее стальное кольцо и новое из фторопласта
Причём кусочек застрял между полюсов ротора. Очистка поверхностей ротора и статора производилась сильной струёй сжатого воздуха. Ещё раз обращаю Ваше внимание на то, что использовать ветошь, кисти, даже чистые не допустимо.Кольца нужного размера найти не удалось, поэтому попробовали выточить кольцо из фторопласта толщиной 1,8 мм. После сборки оказалось, что ротор вращается недопустимо туго, значит нужно было ещё уменьшаь толщину кольца. Но тут кольцо всё-таки нашлось, из одного электроцеха нашли от старого асинхронного двигателя диаметром 36мм при диаметре обоймы подшипника 37 мм. После сборки двигатель заработал, но потом была допущена ошибка, при насадке на вал двигателя шкива использовали удары молотка по окружности. Двигатель сразу пошёл в резонанс. Эта была ошибка в сборке. Пришлось снова разобрать двигатель и проанализировать возможные варианты. Была установлена ещё одна возможная причина некачественной сборки. Это следы герметика на крышках и статоре. То есть герметик возможно нарушал первоначальное положение статора и ротора. Сопредельные участки были тчательно вычищены и двигатель снова собран. На этот раз он заработал. Даже неплохо, но при полной нагрузке стартовал с признаками резонанса. Поэтому было принято решение снизить нагрузку на двадцать процентов. Пока всё хорошо работает. Хотя не даёт покоя мысль, что и в блоке тоже появилась какя-то неисправность. Как проверить? Однако усилия, я считаю не пропали даром, основные принципы разборки и сборки двигателя были определены.
Источник
Шаговый двигатель (Step motor)
 Движение ротора в шаговом двигателе происходит за счет последовательной подачи напряжения на обмотки двигателя, после подачи напряжения на одну из обмоток, ротор фиксируется в определенном положении, а поочередная подача заставляет ротор делать так называемые шаги, именно этот факт определил название — шаговый двигатель (Step motor).
Движение ротора в шаговом двигателе происходит за счет последовательной подачи напряжения на обмотки двигателя, после подачи напряжения на одну из обмоток, ротор фиксируется в определенном положении, а поочередная подача заставляет ротор делать так называемые шаги, именно этот факт определил название — шаговый двигатель (Step motor).
В 30-е годы прошлого столетия появились первые шаговые двигатели и сразу же получили широкое применение во всех отраслях промышленности. Сегодняшние шаговые двигатели претерпли значительные изменения, но принцип работы остался прежним.
Производители шаговых двигателей
 По прошествии практически ста лет шаговый двигатель остается популярным промышленным оборудованием, а его производством занимаются многие известные производители, такие как:
По прошествии практически ста лет шаговый двигатель остается популярным промышленным оборудованием, а его производством занимаются многие известные производители, такие как:
И многие другие производители промышленного оборудования и электроники.
Драйвер шагового двигателя (Stepper driver)
За направление вращения ротора и его скорости отвечает драйвер шагового двигателя, который последовательно подает напряжение на обмотки статора, ток на обмотках определяет угол поворота вала. Драйвер шагового двигателя (Stepper driver) — это силовой модуль в задачу которого входит последовательное формирование тока питания для каждой обмотки двигателя.
| Схема управления шаговым двигателем | Схема подключения униполярного шагового двигателя к микроконтроллеру |

| |
| Драйвер шагового двигателя с микрошаговым режимом | Схема контроллера биполярного шагового двигателя |

Ремонт шагового двигателя и драйвера ш.д. в сервисном центре
Наш сервисный центр уделяет максимальное внимание на качество исполнения ремонта. Мы производим ремонт шаговых двигателей и драйверов ш.г. на компонентном уровне с использованием только оригинальных запасных частей, мы уверены в качестве выполненных работ и смело даем гарантию на все ремонтные работы 6 месяцев. Подключение шагового двигателя, настройка и программированиеМы ценим наших клиентов и предлагаем ремонт не только на территории сервисного центра, но и с выездом на территорию заказчика, для подключения шагового двигателя его последующую настройку и программирование. Если вы заинтересованы в ремонте (перемотке) шагового двигателя или в ремонте драйвера шагового двигателя, вы можете оставить заявку на ремонт либо с помощью специальной форме на сайте, либо связавшись с нашими менеджерами несколькими способами:
Вот далеко не полный список производителей промышленной электроники и оборудования, ремонтируемой в нашей компании. Источник Как чинить шаговый двигатель от подклинивания.Подпишитесь на автораПодпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах. Отписаться от уведомлений вы всегда сможете в профиле автора. Прибыли 2 ШД нема 17 400Ш/об. Один из них при вращении подклинивал. Ремонт заключается в частичной разборке ШД, с заменой волнистой шайбой. Аналогичной у меня под рукой не оказалось, поставил шайбу поменьше. Была 11*15 поставил 11*14, допуски +-0,4мм После сборки вал вращается мягко. Никакого мусора внутри шд найдено не было 🙂 Лечите свои ШД правильно. Подпишитесь на автораПодпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах. Отписаться от уведомлений вы всегда сможете в профиле автора. Еще больше интересных постовФотополимерный принтер Anycubic Photon Mono X. Часть первая «ЭКРАН». Черный день 3Д печатника.Подпишитесь на автораПодпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах. Отписаться от уведомлений вы всегда сможете в профиле автора. Добрый день камрады. Вот и настал тот самый черный день которого боятся и ждут с уж. Подробная инструкция по восстановлению btt skr 1.3. LPC1768Подпишитесь на автораПодпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах. Отписаться от уведомлений вы всегда сможете в профиле автора. Blue Pill & SSD1306, ну очень маленькие. но 32 бит!Подпишитесь на автораПодпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах. Отписаться от уведомлений вы всегда сможете в профиле автора. Решил я тут попробовать перейти с 8 бит на 32. КомментарииВы бы хоть фотку сделали. Какую вы шайбу заменили? Какую функцию она несёт в конструкции? Подклинивал — это ротор за статор зацепляет? О времена, о нравы 3д печатников. В моторе 1 волнистая шайба. Очень трудно перепутать 😉 У меня сейчас похожая проблема. Посмотрите видео пожалуйста. Она ли? У меня двигатель вообще не вращается. На месте дрожит и трещит при подаче тока на него. Это оно или другое что-то? Ток на драйвере регулировали? все нормально работало из коробки, ничего не трогал, и вот на тебе внезапно стало так:cry: Возможно микросхема на драйвере отпаялась. Подключите шаговик к соседнему драйверу и проверьте этот вариант. я не думаю, ибо мотор даже будучи в отключенном состоянии тяжело повернуть. то есть возможно, но с приложением усилий остальные крутятся свободно я разобрал свой двиг — оказалось что ступенчатый магнит на роторе сидит криво по отношению к валу — видимо перетянул ремень, вот он и сдвинулся наконец то. плюс шайбочки которые между частями магнита они все сидят несимметрично по отношению друг к другу — ближе к краям вала. как то можно это исправить с помощью молотка там например? и если нет то как узнать тип двигателя чтобы заказать такой же чтоб не перенастраивать прошивку? Для написания комментариев, пожалуйста, авторизуйтесь. Источник Изучаем миниатюрный шаговый двигательШаговые двигатели нашли широкое применение в современной промышленности и самоделках. Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям. Сегодня хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Мы подробно рассмотрим их устройство и способы управления такими крошечными моторчиками.
Шаговый двигатель — бесколлекторный (бесщёточный) электрический двигатель с несколькими обмотками (фазами), расположенными на статоре и магнитами (часто постоянными) на роторе. Подавая напряжения на обмотки статора, мы можем фиксировать положение ротора, а подавая напряжение на обмотки последовательно можно получить перемещение ротора из одного положения в другое (шаг), причём этот шаг имеет фиксированную угловую величину. Мы не будем останавливаться на рассмотрении каждого типа шагового двигателя. Об этом в сети написано довольно много и хорошо, например здесь. Хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов. Результатами своих поисков и экспериментами я поделюсь в этой статье. Мы рассмотрим вопросы управления такими маленькими моторчиками, а именно:
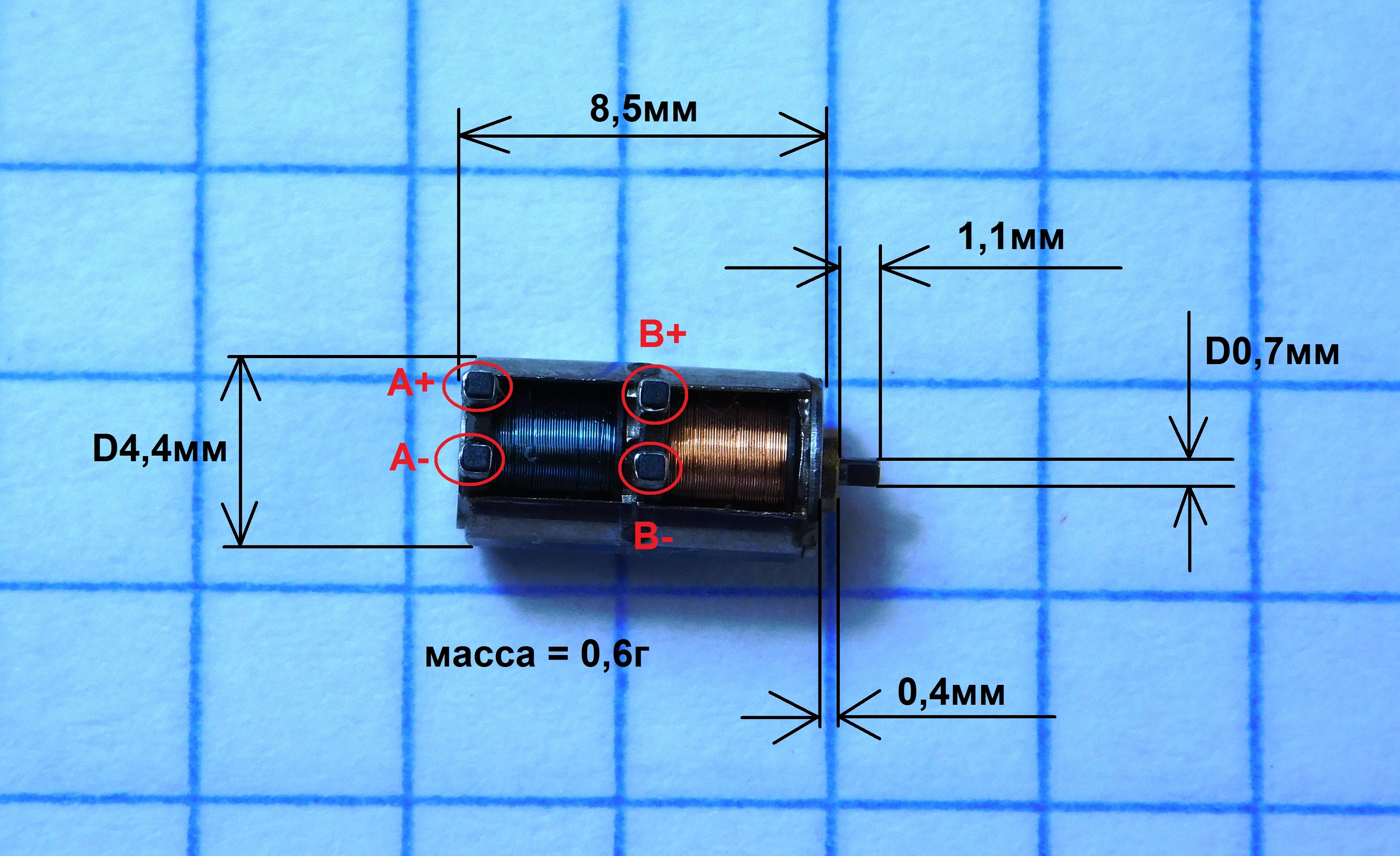
Собственно вопросы тут может вызвать только последний пункт. Поверьте, я тоже был удивлён, когда наткнулся на ролик (вот он), где парень просто берёт и напрямую цепляет шаговый мотор к пинам микроконтроллера! Но давайте обо всём по порядку. ЗнакомствоСначала немного посмотрим на внешний вид нашего героя:
Он действительно очень маленький! Согласно умной книжке Петренко С.Ф. Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага. Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу биполярных шаговых двигателей.
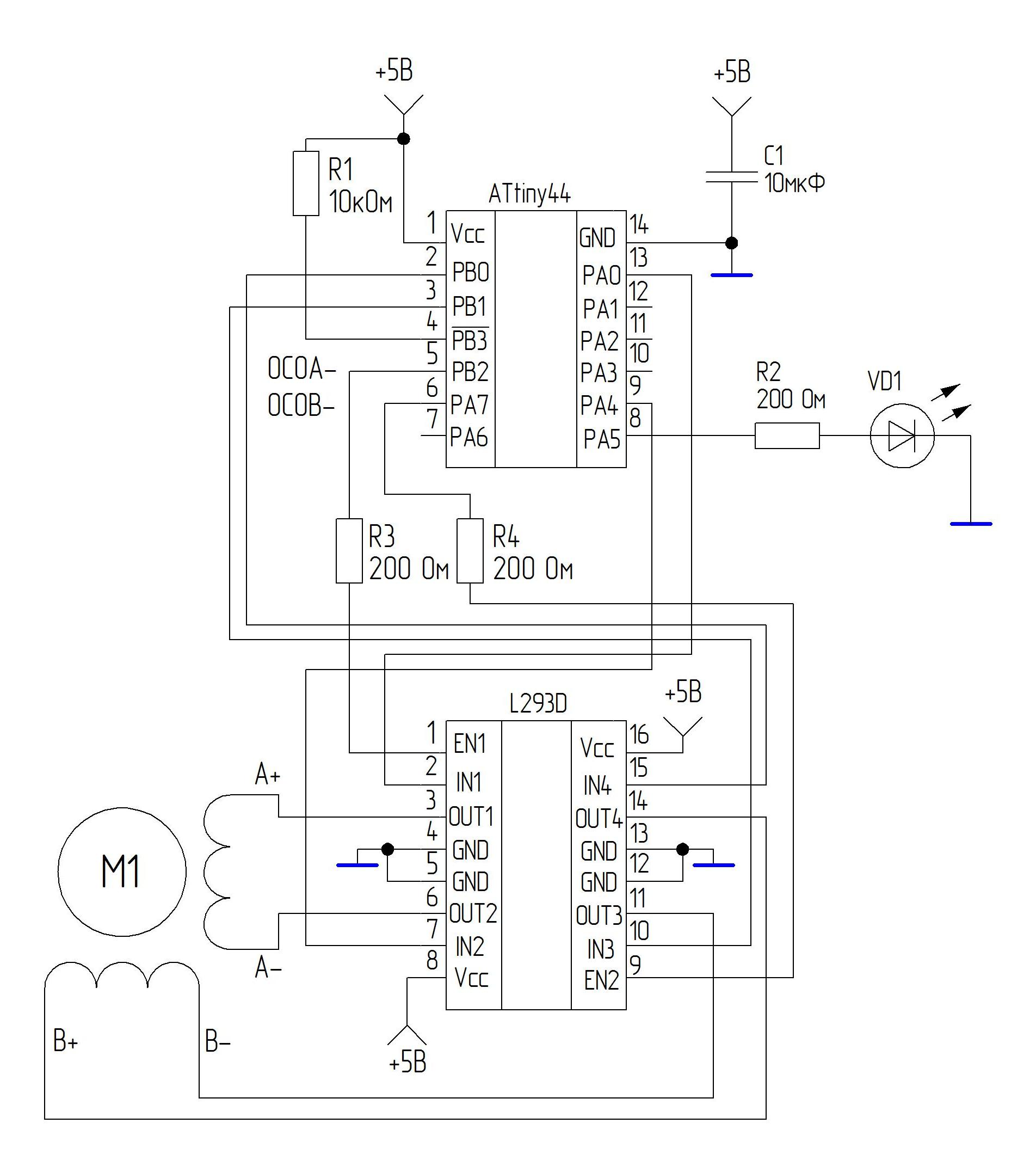
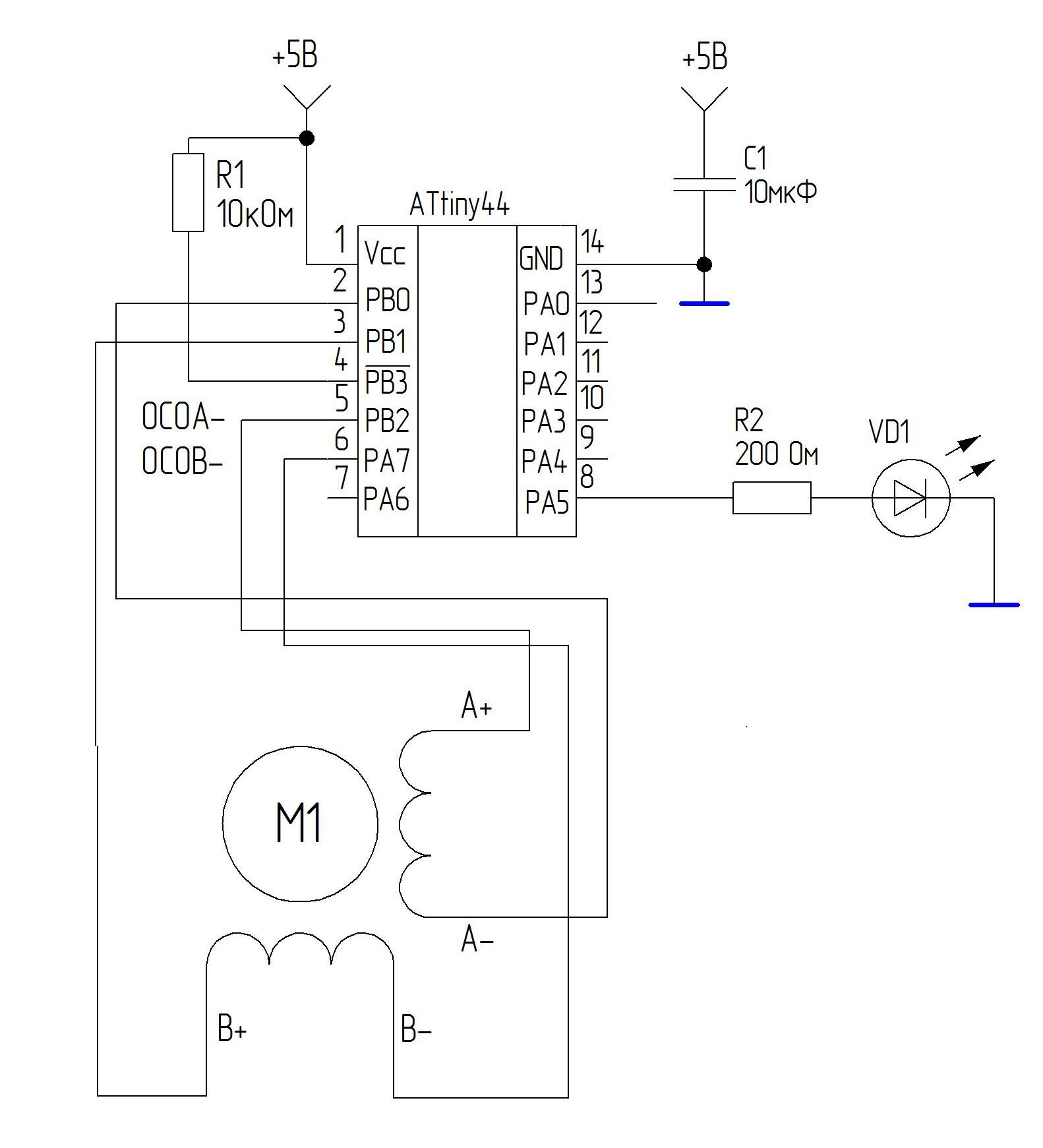
Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет? Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать. Теперь перейдём к вопросу подключения и его электрическим характеристикам. Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше. Сопротивление обмоток около 26Ом, хотя продавец указал 14Ом. Эксперимент №1. L293D + ATtiny44Как мы знаем, для управления биполярным шаговым двигателем необходимо не просто прикладывать напряжения к двум обмоткам в нужной последовательности, но и изменять направление тока в этих обмотках, причём делать это независимо друг от друга. Для этого на каждую обмотку нужен собственный Н-мост. Чтобы не городить его из транзисторов, был взят готовый в лице микросхемы L293D. Ещё одно её преимущество — у микросхемы имеются специальные выводы Enable1 и Enable2, который включают и выключают каждый мост. Их можно использовать чтобы подавать ШИМ сигнал, тем самым, возможно контролировать напряжения питания каждого моста. Зачем это может понадобиться, мы увидим дальше. Кроме того, L293D может коммутировать напряжения до 36В и выдавать до 1,2А на каждый канал, чего вполне должно хватить для питания обмоток нашего моторчика.
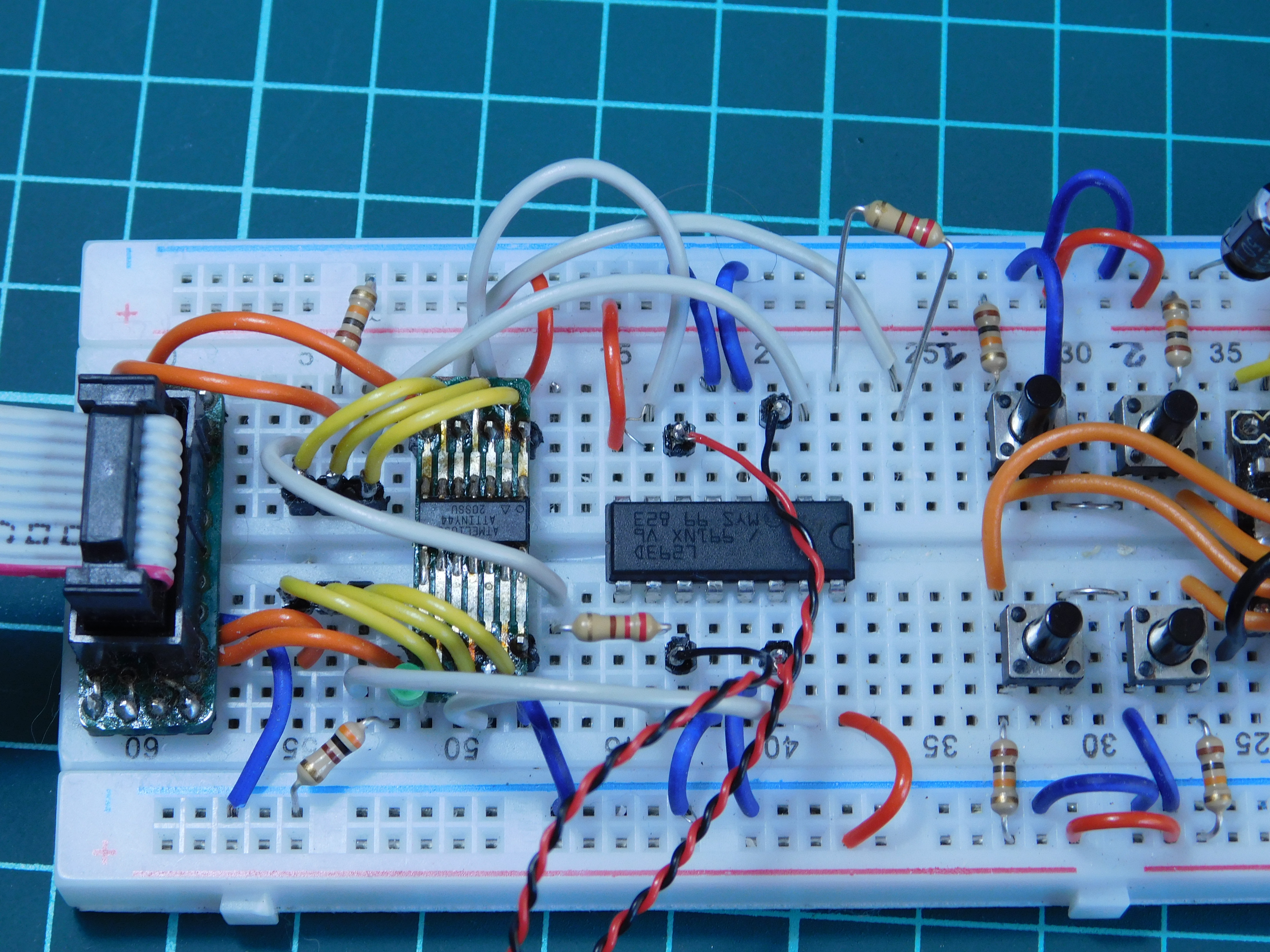
Управляющие входы L293D подключены к выходам OC0A и OC0B, что позволит в будущем подавать на них ШИМ сигнал. Прошивать контроллер будем через внутрисхемный программатор (на схеме не указан).
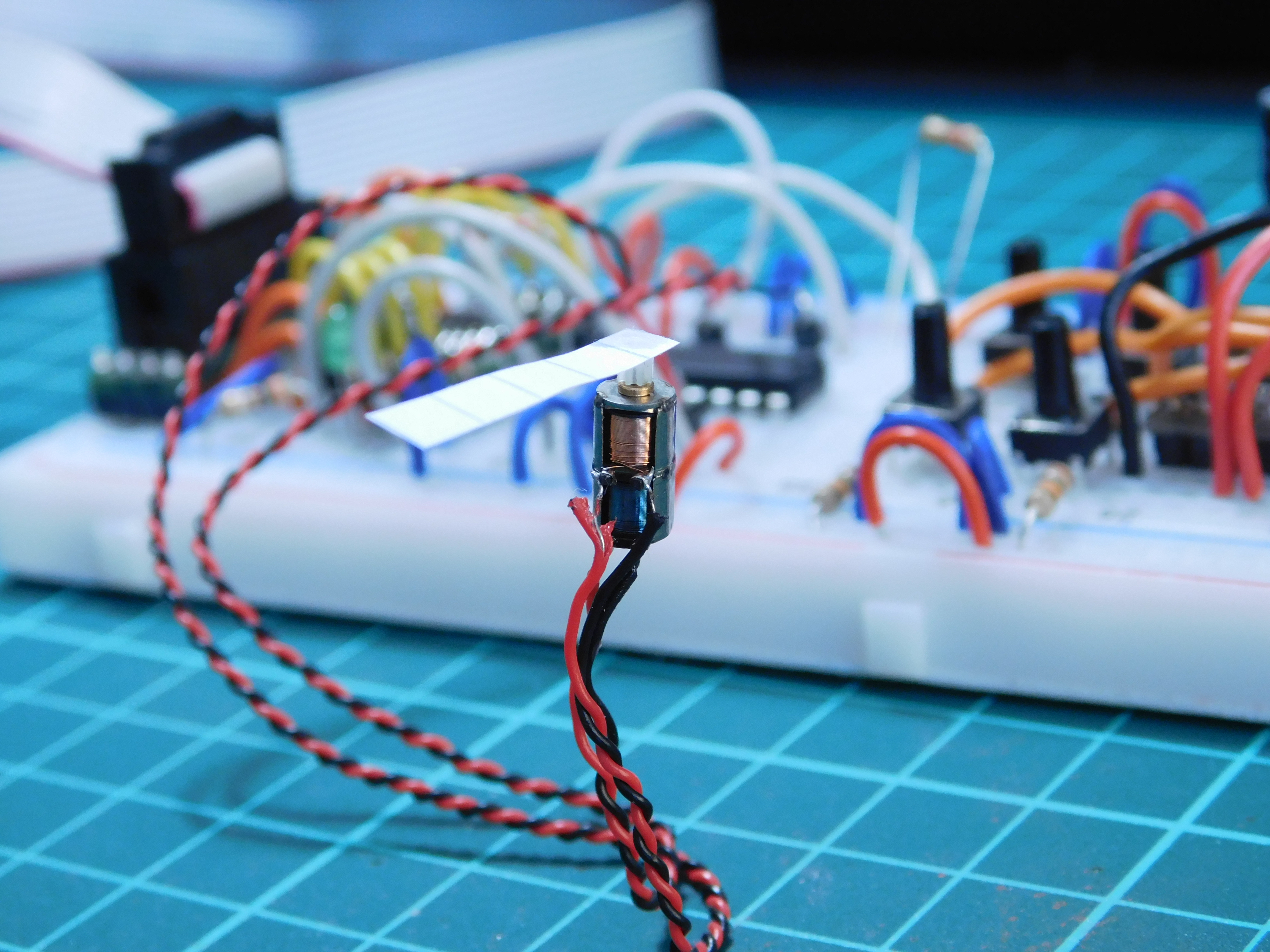
И вот так расположен наш подопытный:
Теперь можно приступать к экспериментам. Рассчитаем ток, который будет течь через обмотки двигателя при подключении их к напряжению 5В: I=U/R = 5В/26Ом = 190мА Совсем небольшой. Интересно как долго он сможет держать такой ток и не перегреться. Включим в цепь одной из обмоток амперметр и вольтметр, и проведём замеры соответствующих величин при подачи питания на эту обмотку через драйвер. При падении напряжения на обмотке 2.56В амперметр показывает ток 150мА, причём хорошо заметно, как начинает падать величина силы тока в процессе нагревания обмоток. Надо отметить, что не так уж и сильно он греется. Убедившись, что напряжение 5В для моторчика опасности не представляет, попробуем покрутить им в разные стороны. И вот теперь пару слов мы скажем про режимы работы шагового двигателя. Об этом довольно хорошо сказано здесь. Не будем повторяться, но вспомним, что шаговый двигатель может работать в трёх режимах:
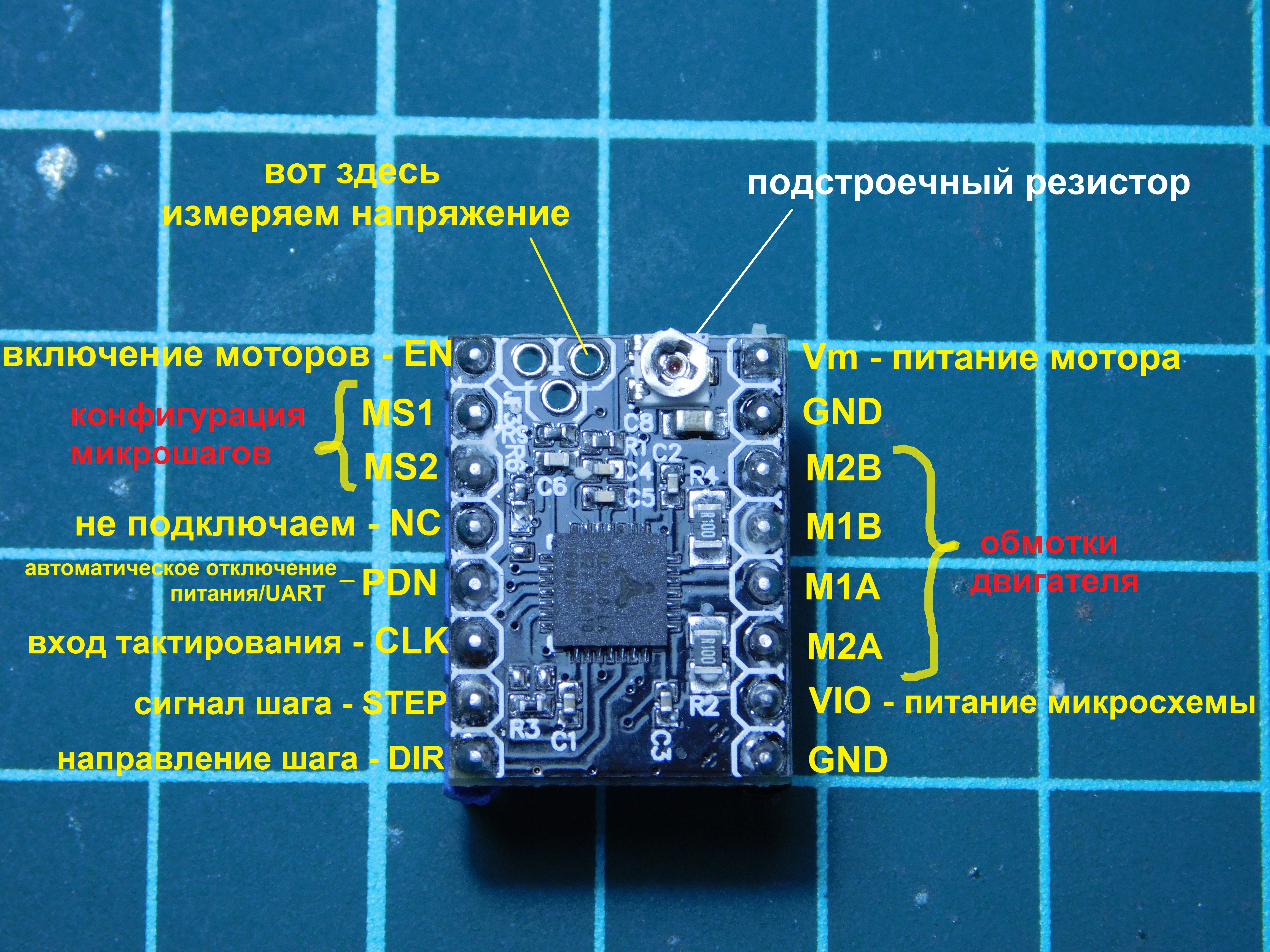
Попробуем реализовать первые два режима на микросхеме L293D а для микрошагового режима оставим специальный драйвер из второго эксперимента. Исходный код программы выглядит следующим образом: Полношаговый режим. Одна фазаДвигатель делает 16 шагов на один оборот. Причём шаги для двух фаз имеют не одинаковую угловую величину. Не знаю с чем это связано. Может конструкция двигателя такая? Посмотрим на максимальную частоту шагов, которую он может обеспечить в таком режиме, не пропуская их. Минимальная задержка между шагами 2мс, значит 500 шагов/секунду. Неплохо, это 31 об/сек = 1850 об/мин. Полношаговый режим. Две фазыОбратите внимание, что в этом случае шаги получаются ровнее, они одинаковы по величине (во всяком случае, более одинаковы, чем в предыдущем случае). Естественно, в этом случае под напряжением находятся одновременно две обмотки и теплоотдача возрастает. Двигатель уже через несколько секунд нагревается достаточно сильно, потому эксперимент я прекратил. Что с максимальной частотой шагов? 500 шагов/секунду; 31 об/сек = 1875 об/мин. Эксперимент №2. TMC2208 + ATtiny44TMC2208 — название микросхемы-драйвера для управления биполярными шаговыми двигателями, аналогично называется модуль на её основе, который выпускается для установки в самодельные (и не только) 3D принтеры и имеет унифицированное расположение выводов. В интернете много написано про то, как установить его в свой 3D принтер, но нас интересует как подключить модуль к микроконтроллеру, потому давайте разбираться. Характеристики микросхемы впечатляют (только впечатлительных людей):
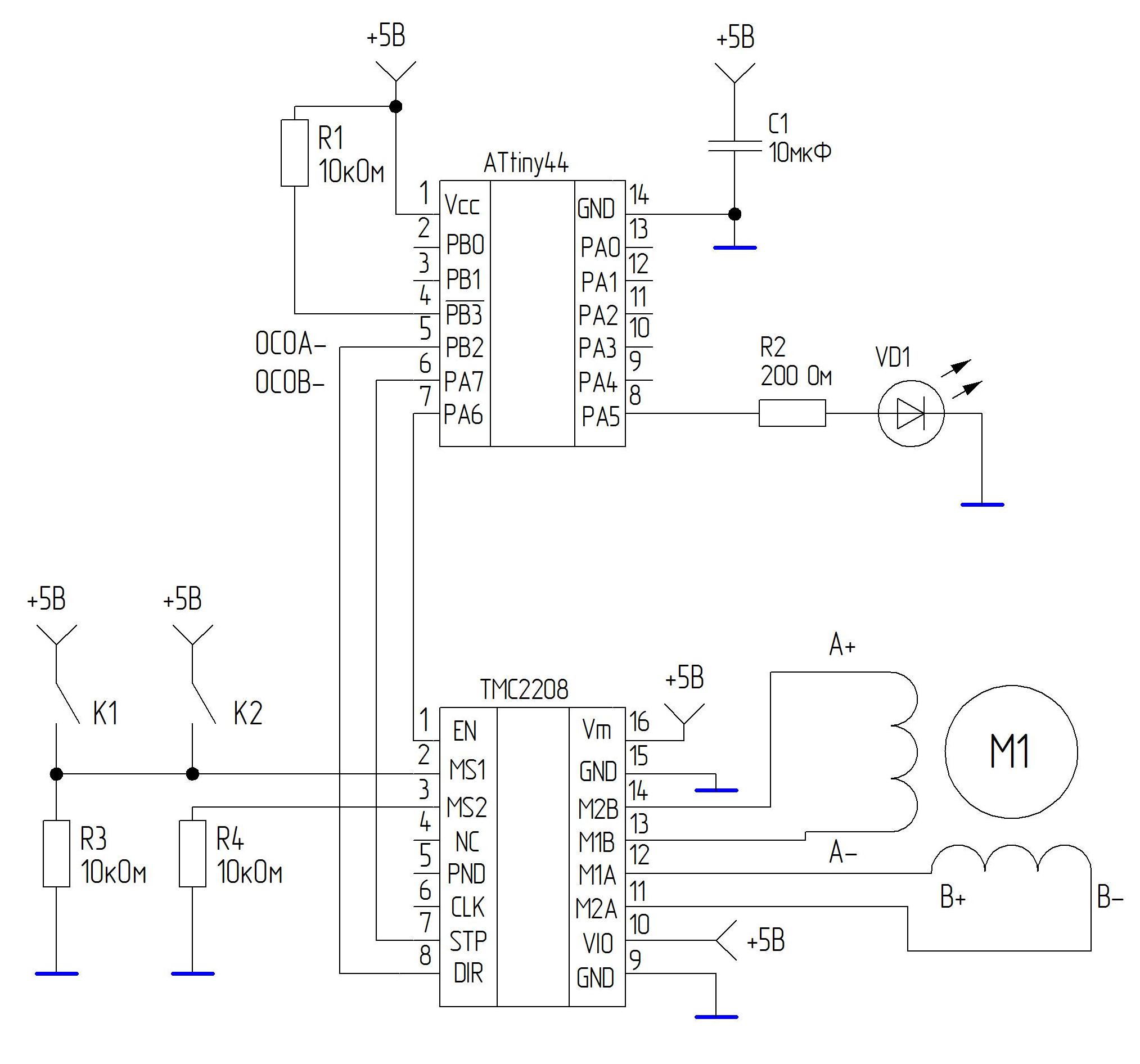
Управлять ей очень просто, по сути нужно всего два пина микроконтроллера. Один подключаем к DIR — указываем направление вращения двигателя, другой подключаем к STEP — при подаче импульса микросхема производит необходимые манипуляции с токами и напряжениями на обмотках двигателя и тот делает один шаг. Схема подключения будет выглядеть так:
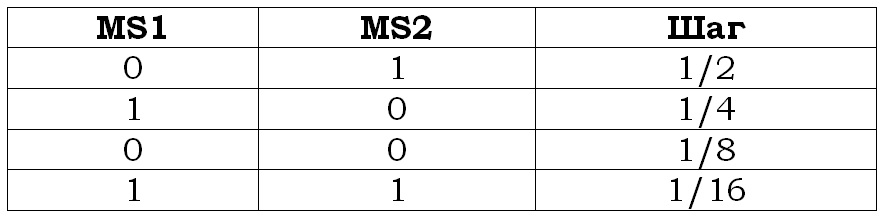
Дополнительно я использовал пин EN, чтобы отключать моторчик и длительное время не держать обмотки под напряжением. Перед тем как всё запустить нужно произвести предварительную настройку модуля. Во-первых, выставить желаемый режим микрошага. Во-вторых, выставить желаемый максимальный ток двигателя. С микрошагом всё просто. За это отвечают пины MS1 и MS2.
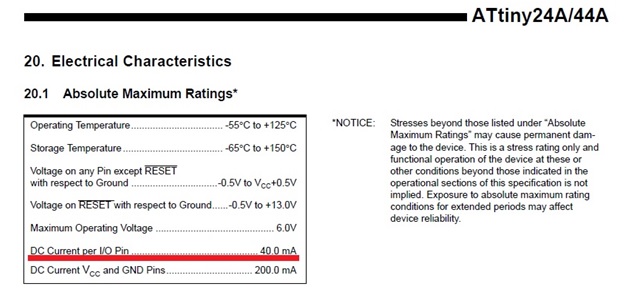
Отмечу, что микросхема не скачкообразно меняет напряжение, а делает это «плавно», но так как микросхема цифровая, то на выходе у нас не гладкий сигнал, а сигнал с маленьким шагом, если верить документации, то каждый шаг она разбивает на 256 микрошагов. Сделано это для увеличения плавности хода, снижения шумов от двигателя и по идее не должно позволять конструкции, к которой он прикручен, входить в резонанс. Короче, всё для того, чтобы 3D принтер работал тише. Чтобы выставить ток двигателя необходимо измерить напряжения на контакте Vref, который указан на рисунке. Изменить значение напряжения можно при помощи потенциометра, установленного рядом с контактом. Напряжение на контакте будет пропорционально току двигателя, и зависимость будет иметь следующий вид: Нашему моторчику нужно примерно 150мА, потому Vref = 0,216В. Устанавливаем… Подразумевается, что увеличение тока микросхема обеспечивает за счёт увеличения напряжения на обмотке. Потому, нужно позаботиться о том, чтобы этого напряжения хватило. Но, полагаю, для того маленького моторчика должно хватить и 5В. Протестируем работу моторчика с различными режимами микрошага и посмотрим что получится (пауза между микрошагами 10мс): Можно заметить, что движения моторчика стали более плавными (по сравнению с предыдущим экспериментом), однако характерные 16 шагов всё равно наблюдаются довольно чётко. Что же… видимо это черта шаговых двигателей с ротором из постоянных магнитов. Полагаю, для таких моторчиков использование такого драйвера, да и вообще режимов микрошага не очень целесообразно. Эксперимент №3. ATtiny44-драйверВернёмся ненадолго к первому эксперименту и вспомним, что входы EN1 и EN2 микросхемы драйвера подключены к пинам OC0A и OC0B микроконтроллера. Это значит, что мы можем подать туда ШИМ сигнал, генерируемый при помощи таймера TIMER0 и таким образом изменять напряжение, прикладываемое к обмоткам двигателя и соответственно регулировать ток, который будет протекать через них. Согласно даташиту на микроконтроллер ATtiny44 максимальный ток, который может выдать один пин составляет всего 40мА. Причём не указано для какого вида тока (пульсирующего или постоянного) эта характеристика. Просто она есть и она вот такая… Надо сказать, что я более 7 лет знаком с микроконтроллерами фирмы ATMEL. И ни разу у меня не возникло желания проверить эту строчку из даташита.
Возможно, производитель просто подстраховывается и на самом деле он может выдать больше, а может это действительно максимум, что может выдать один пин. Мы это выясним. Но сначала нужно выяснить при каком минимальном токе моторчик вообще способен вращаться. Используя схему из первого эксперимента, подгоняем значение тока через обмотки равное 40мА. Запускаем в полношаговом режиме с двумя фазами (так как будет выше крутящий момент): Отлично! При 40мА двигатель успешно запустился! Был также выявлено минимальное значение тока обмоток, необходимое для устойчивой работы мотора, и равно оно 30мА. Разумеется, крутящий момент будет значительно ниже, но для нас важен сам факт того, что удалось запустить моторчик с таким маленьким энергопотреблением. Схема подключения шагового двигателя к микроконтроллеру будет следующей:
Поскольку каждый пин микроконтроллера работает как полумост (может коммутировать вывод микросхемы либо на Vcc, либо на GND), то для управления биполярным шаговым мотором нам понадобиться 4 пина микроконтроллера. Немного поясню как работает эта программа. Это модифицированный код из первого эксперимента. Как я говорил выше, будет использован 8 битный TIMER0 для генерирования ШИМ сигнала на выходах OC0A и OC0B. Таймер настраивается в режим FastPWM с предделителем на 8 (частота сигнала при 8МГц тактового генератора микроконтроллера составляет 3906Гц). Чтобы изменять полярности сигналов на обмотках происходит переключение пина микроконтроллера от Vcc к GND изменением соответствующего бита в регистре PORTx и изменением коэффициента заполнения ШИМ путём записи значений в регистры OCR0A и OCR0B (значения подбирались экспериментально). Курс схемотехники, прослушанный на первом курсе института подсказывает, что мультиметр показывает среднеквадратическое значение напряжения и тока в двигателе. Шаговый двигатель вращается от пинов микроконтроллера без драйверов! Но здесь мы не выходим за пределы возможностей микроконтроллера, по крайней мере, если верить тому, что пишут в документации. В таком режиме микроконтроллер и моторчик могут работать долго. Действительно, эксперимент длился 20 минут. За это время не наблюдалось ни пропуска шагов, ни сброса контроллера, ни перегрева (ни у двигателя, ни у контроллера). Отбросим все предосторожностиУберём из эксперимента ШИМ и будем напрямую управлять пинами микроконтроллера при помощи регистров PORTx. Посмотрим что будет с микроконтроллером после этого. Работает… с максимальным током в 51мА… Что же… неожиданно, похоже это и есть предельный ток, который может отдать один пин микроконтроллера? Если я ошибаюсь, поправьте меня. В любом случае, ролик с ютуба не обманул. Действительно можно управлять этим моторчиком без всяких драйверов. ВыводыМы подробно изучили миниатюрные биполярные шаговые моторчики, их конструкцию и способы управления ими, для использования в собственных приложениях. 1. Миниатюрный биполярный шаговый мотор с ротором из постоянных магнитов действительно миниатюрный. Его основные особенности:
2. Миниатюрный шаговый двигатель может управляться любыми драйверами, подходящими для работы с биполярными шаговыми моторами, необходимо только подобрать параметры тока обмоток. 3. Использование специализированного драйвера TMC2208 является спорным вопросом, так как микрошаговый режим не поддерживается самим двигателем, хотя переходы между шагами выполняются более плавно. 4. Возможно подключение шагового двигателя непосредственно к портам микроконтроллера. Но это только в рамках эксперимента, так как крутящий момент в данном случае совсем незначителен, да и малый ток не позволяет совершать шаги с большой скоростью. В следующий раз расскажу, для чего именно нам потребовались такие маленькие шаговые моторчики. Источник |

 Сервисный центр «Кернел» предлагает услуги по ремонту промышленной электроники и оборудования такого как шаговые двигатели и драйвера шаговых двигателей. В виду малого ресурсного запаса драйвера ш.д. не редко выходят из строя, обратившись в нашу компанию вы гарантированно получите глубокую диагностику промышленного оборудования, которая покажет причину выхода из строя оборудования и последующий профессиональный ремонт драйвера шагового двигателя в сжатые сроки.
Сервисный центр «Кернел» предлагает услуги по ремонту промышленной электроники и оборудования такого как шаговые двигатели и драйвера шаговых двигателей. В виду малого ресурсного запаса драйвера ш.д. не редко выходят из строя, обратившись в нашу компанию вы гарантированно получите глубокую диагностику промышленного оборудования, которая покажет причину выхода из строя оборудования и последующий профессиональный ремонт драйвера шагового двигателя в сжатые сроки.