Регулятор оборотов электродвигателя: назначение, принцип работы
В большинстве современных бытовых и промышленных приборов применяются электрические машины, совершающие какую-либо полезную работу. В качестве рабочего инструмента в них могут выступать самые разнообразные приспособления, которые необходимо вращать с различной скоростью. Для изменения этого параметра используется регулятор оборотов электродвигателя.
Назначение
Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик. Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
- Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
- Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
- Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.
Принцип работы
Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения.
Среди используемых в промышленной и бытовой сфере следует выделить:
- Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей. Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
- Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя. Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности.
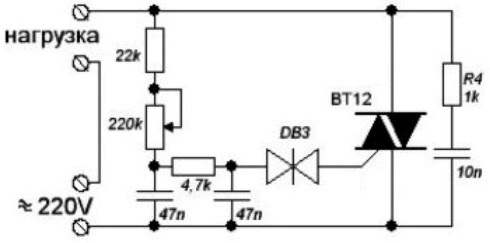
- Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.
 Рис. 1. Схема тиристорного регулятора
Рис. 1. Схема тиристорного регулятора
Как видите на схеме, подаваемое на тот же асинхронный однофазный электродвигатель напряжение, проходит через переменный резистор R1 на тиристор D1 и на управляющий электрод симистора T1. Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
- Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже.
 Регулировка оборотов на транзисторах
Регулировка оборотов на транзисторах
Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора.
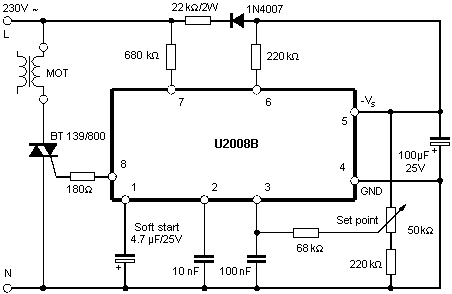
- Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных. Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
 Пример частотного регулирования
Пример частотного регулирования
- Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них. Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
 Регулировка оборотов переключением пар полюсов
Регулировка оборотов переключением пар полюсов
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Подключение
Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства:
 Схема подключения регулятора
Схема подключения регулятора
Далее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG:
 Распиновка регулятора
Распиновка регулятора
Затем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше.
 Проверьте цветовую маркировку
Проверьте цветовую маркировку
Если все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети.
Источник
Виды и устройство регуляторов оборотов коллекторных двигателей
Коллекторные двигатели часто можно встретить в бытовых электроприборах и в электроинструменте: стиральная машина, болгарка, дрель, пылесос и т. д. Что совсем не удивительно, ведь коллекторные двигатели позволяют получать и высокие обороты, и большой крутящий момент (в том числе высокий пусковой момент) — что и нужно для большинства электроинструментов.
При этом коллекторные двигатели могут питаться как постоянным током (в частности — выпрямленным), так и переменным током от бытовой сети. Для управления скоростью вращения ротора коллекторного двигателя применяют регуляторы оборотов, о них и пойдет речь в данной статье.

Для начала вспомним устройство и принцип работы коллекторного двигателя. Коллекторный двигатель включает в себя обязательно следующие части: ротор, статор и щеточно-коллекторный коммутационный узел. Когда питание подается на статор и на ротор, их магнитные поля начинают взаимодействовать, ротор начинает в итоге вращаться.
Питание на ротор подается через графитовые щетки, плотно прилегающие к коллектору (к ламелям коллектора). Для изменения направления вращения ротора, необходимо изменить фазировку напряжения на статоре или на роторе.

Обмотки ротора и статора могут питаться от разных источников или же могут быть соединены параллельно либо последовательно друг с другом. Так различаются коллекторные двигатели параллельного и последовательного возбуждения. Именно коллекторные двигатели последовательного возбуждения можно встретить в большинстве бытовых электроприборов, поскольку такое включение позволяет получить устойчивый к перегрузкам двигатель.
Говоря о регуляторах оборотов, прежде всего остановимся на самой простой тиристорной (симисторной) схеме (смотрите ниже). Данное решение применяется в пылесосах, стиральных машинах, болгарках, и показывает высокую надежность при работе в цепях переменного тока (особенно от бытовой сети).
Работает данная схема достаточно незатейливо: на каждом периоде сетевого напряжения конденсатор заряжается через резистор до напряжения отпирания динистора, присоединенного к управляющему электроду основного ключа (симистора), после чего симистор открывается и пропускает ток к нагрузке (к коллекторному двигателю).
Регулируя время зарядки конденсатора в цепи управления открыванием симистора, регулируют среднюю мощность подаваемую на двигатель, соответственно регулируют обороты. Это простейший регулятор без обратной связи по току.
Симисторная схема похожа на обычный диммер для регулировки яркости ламп накаливания, обратной связи в ней нет. Чтобы появилась обратная связь по току, например чтобы удерживать приемлемую мощность и не допускать перегрузок, необходима дополнительная электроника. Но если рассмотреть варианты из простых и незатейлевых схем, то за симисторной схемой следует реостатная схема.
Реостатная схема позволяет эффективно регулировать обороты, но приводит к рассеиванию большого количества тепла. Здесь требуется радиатор и эффективный отвод тепла, а это потери энергии и низкий КПД в итоге.
Более эффективны схемы регуляторов на специальных схемах управления тиристором или хотя бы на интегральном таймере. Коммутация нагрузки (коллекторного двигателя) на переменном токе осуществляется силовым транзистором (или тиристором), который открывается и закрывается один или несколько раз в течение каждого периода сетевой синусоиды. Так регулируется средняя мощность, подаваемая на двигатель.
Схема управления питается от 12 вольт постоянного напряжения от собственного источника или от сети 220 вольт через гасящую цепь. Такие схемы подходят для управления мощными двигателями.
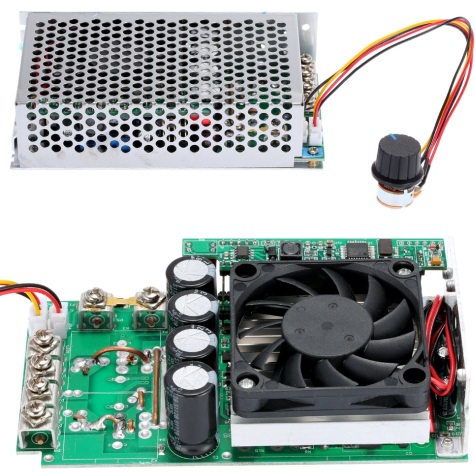
Принцип регулирования с микросхемами на постоянном токе — это конечно ШИМ — широтно-импульсная модуляция. Транзистор, например, открывается с строго заданной частотой в несколько килогрец, но длительность открытого состояния регулируется. Так, вращая ручку переменного резистора, устанавливают скорость вращения ротора коллекторного двигателя. Данный метод удобен для удержания малых оборотов коллекторного двигателя под нагрузкой.
Более качественное управление — именно регулировка по постоянному току. Когда ШИМ работает на частоте порядка 15 кГц, регулируя ширину импульсов, управляют напряжением при примерно одном и том же токе. Скажем, регулируя постоянное напряжение в диапазоне от 10 до 30 вольт, получают разные обороты при токе порядка 80 ампер, добиваясь требуемой средней мощности.
Если вы хотите изготовить простой регулятор для коллекторного двигателя своими руками без особых запросов к обратной связи, то можно выбрать схему на тиристоре. Потребуется лишь паяльник, конденсатор, динистор, тиристор, пара резисторов и провода.
Если же нужен более качественный регулятор с возможностью поддержания устойчивых оборотов при нагрузке динамического характера, присмотритесь к регуляторам на микросхемах с обратной связью, способным обрабатывать сигнал с тахогенератора (датчика скорости) коллекторного мотора, как это реализовано например в стиральных машинах.
Источник