Комплэйс – официальный сервисный центр iRobot. Осуществляем срочный ремонт роботов пылесосов в Москве любой модели и обслуживание. В том числе производим восстановление платы управления, колеса, щеток, питания, батареи, базы, а также датчиков и пылесборника с гарантией. Диагностика бесплатная. Цены низкие.
Выполняем ремонт пылесосов следующих производителей:
В сервисном центре устраняем неисправности:
Не заряжается Не всасывает пыль Мало убирается Не встает на базу Крутится на месте Не убирается Запчасти Бесплатная диагностика Наиболее популярны iRobot Roomba. Во-первых, они надежны, сделаны из продуманных и надежных комплектующих. Во-вторых, для ремонта робота пылесоса этой модели больше всего запчастей и расходных материалов. Запасные части дешевые, потому что их много. И наоборот, для других брендов детали найти трудно и они дороже. Если боковая щетка для iRobot стоит 200, то аналогичная Xiaomi 600 рублей. А аккумуляторов для некоторых китайских моделей вообще нет в продаже.
Цена ремонта робота пылесоса определяется после диагностики и не превышает половины стоимости самого изделия. Потому что дороже нет смысла чинить. Смотрите стоимость запчастей для робота пылесоса Roomba.
Услуги для роботов пылесосов по неисправностям:
Неисправность пылесоса
Цена от руб.
Заказать
Не работает, выдает ошибку
500
Заказать
Не включается
3000
Заказать
Не заряжается
2000
Заказать
Крутится в одну сторону
1500
Заказать
Мало убирает, быстро кончается зарядка
2500
Заказать
Не становится на зарядку
1000
Заказать
Заезжает на базу во время уборки
1500
Заказать
Не всасывает, оставляет мусор
1000
Заказать
Посторонние звуки во время уборки, трещит, жужжит, стучит
500
Заказать
Ремонтируем роботы пылесосы следующих марок: iRobot, Xrobot, iClebo, Samsung, LG, Xiaomi, Clever&Clean, Panda, Redmond, Polaris, Karcher, AEG, Philips, Proscenic, Tefal, Electrolux, Miele, Unit, Seebest, iLife, iSeelife, Haier, Midea, Liectroux, Kitfort, iBoto и др.
Ремонт питания робота пылесоса
Замена аккумулятора робота пылесоса
Диагностика и замена аккумулятора (АКБ) пылесоса- самая частая процедура. Ведь большинство из них оснащается NiMH батареями, имеющие небольшой срок жизни. Ремонт АКБ выполняется только в крайнем случае. Но прежде чем заменить батарею, мы проводим его диагностику. Следует проверить, не является ли малое время уборки пылесосом следствием большой загрязненности, а не неисправности АКБ.
Батарея для пылесоса Roomba
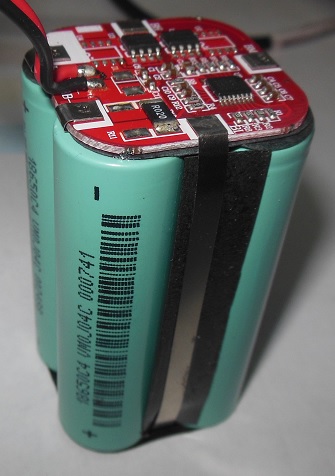
Последние модели Roomba оснащаются Li-Ion батареями с большим сроком службы. Но и у них средний жизненный период примерно 5-6 лет.
У нас в продаже есть Li-Ion аккумуляторы для любых моделей пылесосов iRobot. А также батареи для XRobot, Clever&Clean.
Ремонт аккумуляторов осуществляем, если в продаже их нет по умеренным ценам. Потому что он обойдется дороже нового.
Батареи состоят из элементов и схемы управления зарядкой и защиты. Элементы можно заменить. Дело это непростое, потому что соединения осуществляются точечной сваркой.
Ремонт базы и блока питания робота пылесоса
Оригинальный блок питания 3500, восстановить 1500-2000 руб.
Зарядная база для Roomba 4500, починить 1500-2500 руб.
Компактная зарядная база с интегрированным БП тоже ломается. В ней выходят из строя электроника, нижние контакты, а также разъем для подключения питания.
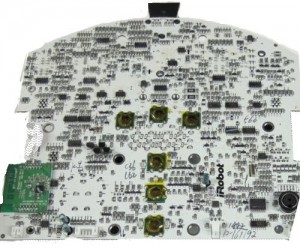
Ремонт платы роботов пылесосов
Ремонт платы пылесосов среднего уровня стоит 4000-6000 р. Например, ремонт платы iRobot 500 и 600 серий. При комплексной неисправности, например, вышли из строя колесо и логика, стоимость не превысит 7000 р. Это при условии, что мы починили главную плату управления. Если требуется замена, то каждый случай оговариваем индивидуально.
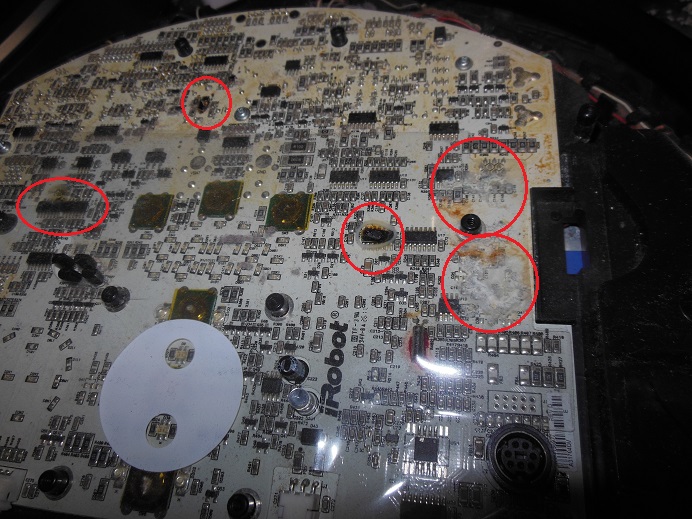
Чаще всего неисправность вызывается залитием сверху или снизу, что приводит к коррозии, замыканиям и выгоранию элементов. Выгорают даже проводящие дорожки. Чтобы отремонтировать, мы восстанавливаем поврежденные дорожки.
Реальные случаи, когда сгорела главная плата:
уборка мокрого пола;
а также, пролили жидкость;
просто кот написал сверху;
бабушка помыла под душем, потому что думала, что это можно;
убрал то, что нагадила собака.
Просто так платы iRobot не горят. Во всяком случае, нами не зафиксировано ни одного случая, потому что там все очень надежно. Только у XRobot, Clever&Clean и других малоизвестных производителей, но это другая тема.
Стоимость новой платы для Roomba 780 больше 10000, а починить в любом случае дешевле 7500 р. даже при масштабных повреждениях. Ремонт платы недорогих моделей еще меньше.
Замена главной платы робота пылесоса
Если не удается починить главную плату, заменяем ее. Только если она есть в продаже у кого-то. Эта позиция, к сожалению, дефицитная.
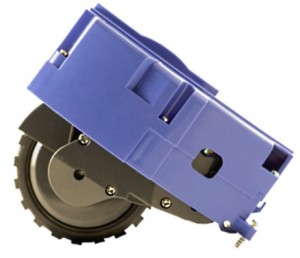
Если после ремонта колесо не работает, скорее всего, неисправна схема управления им. Обычно из-за попадания жидкости. В попадании жидкости признаются только 10 % клиентов, остальные 90% уверены, что никто не заливал. Но при разборке следы жидкости четко видны в виде серых разводов и местной коррозии.
В данном устройстве чиним редуктор, а также двигатель и переключатель.
Замена щеток
Щетка ворсяная Roomba 500-600-700 1000 руб.
Резиновая щетка Roomba 500-600-700 600 руб.
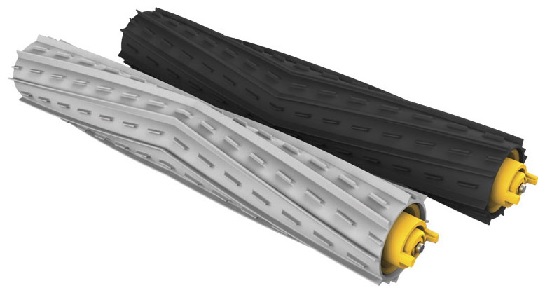
Резиновые щетки-скребки для Roomba 800-900 серий. Комплект 2100 руб.
Боковая щетка Roomba от 400 руб.
Ремонт блока щеток, боковой щетки
Блок щеток Roomba 500-600-700 2500-4000 руб.
Сломаться в этом узле может многое: щетки, втулки, редуктор, а также двигатель, которого не видно. Если этот узел совсем не функционирует, нужно починить двигатель или редуктор.
Например, ремонт редуктора может заключаться в чистке и смазке. Если редуктор сильно загрязнен, щетки не будут вращаться и мусор не будет попадать в пылесборник. Вы это сразу заметите по грязному полу. Крошки останутся на месте.
модуль боковой щетки 1500-2000 руб.
Его есть смысл ремонтировать.
Модуль ведущего колеса от 500 р.
Ремонт пылесборника
Основная неисправность пылесборника – поломка двигателя насоса. Больше там нечему ломаться. Если двигателя нет в продаже, нужно менять весь контейнер.
Но случается, что двигатель ни причем, неисправна плата управления. А починить ее стоит дороже пылесборника. Поэтому обязательно закажите диагностику.
Ремонт датчиков
Роботы пылесосы буквально напичканы датчиками. Если не работает какой-то датчик, не будет выполняется полностью какая-то операция. Поиск неисправного сенсора выполняется во время диагностики. Иногда достаточно протереть его, чтобы он перестал сбоить. Тест датчиков часто есть во встроенной самодиагностике.
В изделиях Xiaomi чиним лазерный локатор лидар.
Это сложное устройство располагается сверху и нужно для ориентации в пространстве, определения расстояния до объектов.
Ремонт пылесоса с выездом мастера на дом не производим, только в сервисном центре. Забрать можем, если вы расположены недалеко.
Цены на ремонт роботов пылесосов
Проблема
Цена руб.
Диагностика при согласии на работы/ без него
0/ 1000
Ремонт материнской платы
3000-10000
Сложный ремонт платы iRobot Roomba 700 и 800 серий
до 7500
Ремонт платы управления Clever&Clean и XRobot
3000-4000
Полная чистка и смазка пылесоса
2000
Ремонт колеса/редуктора
от 1000/1500
Замена боковой щетки
от 200
Замена центральной щетки
от 1000
Ремонт пылесборника/датчика
4000/1500
Починка базы, блока питания
от 1500
Ремонт лидара
2500
Ремонт нижних контактов зарядки, ее разъема 1000 руб. 1-2 дня.
1500
Стоимость ремонта зависит от модели и неисправности, чаще всего ее можно выяснить только после диагностики.
Часы работы: По будням с 10 до 20 часов
До 10-00 часов можно оставить устройство на охране напротив нашего офиса запиской с номером телефона. После 20-00 позвонить по телефону +79168027768, чтобы вас дождался специалист.
В субботу с 11-00 до 18-00 До 11 также, как и по будням можно оставить технику для ремонта на охране с вашим номером телефона.
Источник
ИНСТРУКЦИЯ ПО РЕМОНТУ РОБОТА ПЫЛЕСОСА PANDA X500 (1/1)
ИНСТРУКЦИЯ ПО РЕМОНТУ РОБОТА ПЫЛЕСОСА PANDA X500 2 года 5 мес. назад #5101
master_tv
Не в сети
Модератор
Мастер по ремонту электроники
Сообщений: 4680
Спасибо получено: 618
Репутация: -74
САМЫЕ РАСПРОСТРАНЕННЫЕ ОШИБКИ:
Ошибка возникает в нескольких случаях: 1. Пылесос в выключенном состоянии поставлен на зарядку. В выключенном состоянии зарядка не производится. 2. Попробовать зарядить через базу и через адаптер. 3. Проверить адаптер, напряжение должно быть 23, 24 вольта. 4. Проверить аккумулятор 5. Если пылесос подключен через исправный адаптер к сети, но все равно выдает Е10, то проблема в выключателе. 6. Если адаптер и выключатель- исправны и аккумулятор в норме, то проблема в материнской плате.
Данная ошибка возникает при неисправности мотора щетки или шестерни мотора. Из-за разницы сторон вращения маркировка щетки и мотора разная, для правой щетки — нужен левый мотор, а для левой — правый. Е08-ошибка правой щетки Е07- ошибка левой щетки. Если мотор не заклинен, то после замены шестерни привод заработает. В противном случае нужно менять весь модуль в сборе.
Ошибка свидетельствует о проблеме с зарядкой аккумулятора. Неисправность адаптера или аккумулятора (гарантия на аккумулятор 1 месяц). Разряженный в ноль аккумулятор можно реанимировать следующими действиями: 1. Подключить пылесос напрямую через адаптер и заряжать минут 20 (обязательно включить пылесос). 2. Если индикация зарядки через 20 минут не проявилась, то, не снимая с зарядки, выключить и включить пылесос и оставите на 40 минут. Может потребоваться несколько таких включений- выключений (если аккумулятору меньше 7 месяцев, то должно помочь). 3. После того как пойдет индикация заряда, заряжать его пока не появится надпись «Full». 4. После чего отключить его секунд на 30 от адаптера и снова поставите на зарядку.
Это ошибка вращения колеса. Так же подобную ошибку может вызвать некорректная работа материнской платы. Для того чтобы точно определить неисправность сделайте следующее: 1. Разобрать пылесос 2. Отсоединить колеса от материнской платы и прокрутить их. То, которое крутится с большим усилием — сломано. Если оба колеса крутятся одинаково, тогда проблема в материнской плате. Часто ошибка возникает из-за слетевшего колеса датчика скорости (черное зубчатое колесо, закрепленное на моторчике). Если оно не треснуло, прежде чем слететь, его можно посадить обратно на ось суперклеем.
Часто проблемы с вентилятором вызваны механическим воздействием на заднюю часть пылесоса (сел ребенок, застрял под диваном и т.п.) и его просто зажало, от чего он стал плохо вращаться. В этом случае может помочь ослабления винтов на задней нижней части пылесоса. Зачастую этого бывает достаточно. Если это не помогло, то нужно заменить вентилятор.
Данная ошибка может возникнуть по нескольким причинам: 1. Заклинило бампер или он соскочил с направляющих 2. Помеха для свободного хода толкателя микропереключателя 3. Залипание толкателя микропереключателя 4…Залипание микропереключателя.
Для того чтобы установить причину необходимо выполнить следующие действия: 1. Открутить бампер (винты можно выкрутить не полностью, он снимется), провод от бампера не отсоединять, он мешать не будет 2. Под бампером на самом роботе есть два прозрачных пластиковых толкателя (слева и справа), нажать и отпустить, должен раздаться щелчок. Если щелчок есть, то микропереключатель работает. 3. Далее, запустить робот со снятым бампером. Если он поехал прямо, значит все работает, просто бампер был перекошен. 4. Поставить бампер на место, закрутить винты и нажать на него. Если он вернулся обратно, значит установлен правильно. Если обратно не возвращается, то чуть ослабить винты и снова проверить. Помехой для свободного хода толкателя обычно является слишком длинный цилиндр (на фото обозначенный овалом). Достаточно срезать с цилиндр на 1 мм, чтоб устранить эту проблему.
Если при нажатии прозрачного толкателя не слышно щелчка, то скорее всего залип микропереключатель, надо попробовать его восстановить: 1. Подвести плоскую отвертку под металлическую полоску (на которую нажимает толкатель снизу) ближе к краю. Вытолкнуть край полоски наверх. Она достаточно гибкая. После этого свободный кончик полоски будет переброшен на прозрачный пластик, как бы сверху. Если полоска выскочит, ее можно потом установить пинцетом обратно. 2. Под полоской находится беленький квадратик размером 2-3 мм, который отвечает за щелчок. Возможно, он после нажатия не вышел обратно. Освободить иголкой или пинцетом и потом по нему нажать раз десять. Если щелкает, то вернуть полоску обратно и проверить, чтобы все нажималось, как и с другой стороны.
Эта ошибка вызвана залипшим микропереключателем на колесе робота. Чтобы проверить, является ли эта ошибка результатом залипания микропереключателя, нужно взять робот в руки и нажать пару раз на левое и правое колесо (колесо прижать к корпусу и потом отпустить). При нажатии должен раздаться характерный щелчок. Скорее всего, на одном из колес щелчка не произойдет. Микропереключатель находится на модуле колеса. Его хорошо видно на фото11 (маленький белый прямоугольник). Если он ушел вовнутрь и там застрял, его нужно аккуратно разблокировать. Для удобства блок, в котором он находится (фото22), можно открутить, он держится на одном винтике.
После того как датчик выйдет, нужно понажимать колесо. Если он больше не застревает, то проблема решена и ошибки выдавать не будет.
КАК ПОМЕНЯТЬ ВЫКЛЮЧАТЕЛЬ
Робот должен быть полностью выключен. 1. Перевернуть робот и выкрутить двенадцать винтов на дне (один из них находится в отсеке для аккумуляторной батареи-АКБ) 2. Вынуть АКБ, можно при этом даже не отсоединять ее. 3. Выкрутить этот винт. 4. Поставить АКБ на место и закрыть крышкой. Можно закрутить крышку АКБ не на два винта , а временно на один. Это пригодится, чтобы сразу проверить робот после установки новой кнопки. 5. Выкрутить маленькие винтики на переднем бампере. Не нужно выкручивать до конца, надо потянуть, и бампер снимется. Бампер остается висеть на проводах, их не отсоединяем. 6. Перевернуть робот на колеса и снять верхнюю часть. Если выкручены все винты и снят бампер, то верхняя часть держится только за счет трения. Необходимо просто потянуть вверх. 4. От верхней части идет провод, он подсоединен разъемом к плате, надо его отсоединить. 5. Отсоединить выключатель от платы. Затем перевернуть робот и со стороны дна, плоской отверткой подцепить и извлечь выключатель. 6. Обратно продеть через отверстие новый выключатель и подсоединить его. 7. Если дисплей остался в крышке, необходимо извлечь его и поставить на основную плату. На плате для точной установки ножек дисплея есть белые метки. 8. Включить робот новым выключателем. Подключить в боковое гнездо робота зарядное устройство. Если все сделали правильно, то робот начнет заряжаться, начнут мигать 1111 уровня заряда. На 1-2 минуты оставить его так, чтобы убедиться, что заряд идет и ошибок нет. Выключить и собрать аппарат.
При сборке надо проверить: Провода динамика и провода от новго выключателя не должны проходить над сквозными отверстиями для винтов. Если они где-то эти отверстия перекрывают, то надо переместить. В идеале можно проложить провода вдоль колес. 9. Подключить обратно провод от верхней крышки. Закрутить крышку. Она должна сесть плотно, если не села, то ее снова надо снять (провод можно не отсоединять в этом случае). ОБЯЗАТЕЛЬНО поправить дисплей, т.к. крышка при любом снятие чуть-чуть вытаскивает его из разъемов и снова одеть. 10. Закрутить винты на дне робота. 11. Одеть бампер. Закрутить его винты. Правильно установленный бампер должен после нажатия на него пружинить обратно.
КАК РАЗОБРАТЬ РОБОТ И ПОМЕНЯТЬ МОТОРЧИК ЩЕТКИ
1. Выкрутить все винты 12 шт. на дне (не забыть винт в отсеке для аккумулятора) 2. Открутить щетку с неисправного мотора 3. Снять аккумулятор 4. Выкрутить все винты на бампере, но можно открутить не до конца, он снимется и так. 5. Датчик в переднем бампере не трогать, бампер остается висеть на проводе, это не помешает. 6. Снять крышку (она пойдет немного туго, но если вынуты все двенадцать винтов, то ее ничего больше не держит, только трение). Отсоединить провод от крышки к плате. Дисплей может остаться в крышке, извлечь его, он не прикручен. 7. Открутить материнскую плату (4 винта) и отсоединить с нее разъемы слева, справа и ближние, дальние разъемы отсоединять не надо, просто приподнять плату от себя, тогда они мешать не будут. РАЗЪЕМЫ НА МАТЕРИНСКОЙ ПЛАТЕ ЗА ПРОВОДА НЕ ОТСОЕДИНЯТЬ, можно оторвать! Надо взять тонкий пинцет или отвертку и выталкивать их через две прорези в разъеме (можно поочередно, чуть-чуть вытолкнуть через прорезь слева, потом справа и т.д.). 8. Моторы крепятся двумя винтами, но их перекрывает сверху полукруглая пластиковая деталь с датчиками (это передние датчики бампера), она достаточно подвижна, ее можно отодвинуть за край чуть в сторону, и, придерживая, открутить два винта мотора. 9. Вынуть мотор, взять новый, для удобства, сразу вложить в него два винта, так же отодвинув мешающую деталь, поставить мотор и закрутить два винта.
Очень тщательно проверить провода, чтобы те не перекрывали отверстия, через которые пройдут винты, соединяющие обе половинки робота. Это провода: выключатель питания, динамика и два сквозных отверстия в материнской плате. Дисплей установить на плату в разъемы по белым меткам, а потом надеть верхнюю половинку робота. Если крышка при закрытии легла неплотно, ее надо снова снять и проверить не мешают ли провода (см.советы выше). Обязательно поправить дисплей (он обычно при открытии крышки выскакивает из разъемов) и снова ее закрыть.
КАК РАЗОБРАТЬ РОБОТ И ПОМЕНЯТЬ МОДУЛЬ КОЛЕСА
1. Выкрутить двенадцать винтов на дне (не забыть винт в отсеке для аккумулятора) 2. Открутить щетку с неисправного мотора 3. Снять аккумулятор 4. Выкрутить все винты на бампере, но можно открутить не до конца, он снимется и так. 5. Датчик в переднем бампере не трогать, бампер остается висеть на проводе, это не помешает. 6. Снять крышку (она пойдет немного туго, но если вынуты все двенадцать винтов, то ее ничего больше не держит, только трение). Отсоединить провод от крышки к плате. Дисплей может остаться в крышке, извлечь его, он не прикручен. 7. Открутить материнскую плату (4 винта) и отсоединить с нее разъемы слева, справа и ближние, дальние разъемы отсоединять не надо, просто приподнять плату от себя, тогда они мешать не будут. РАЗЪЕМЫ НА МАТЕРИНСКОЙ ПЛАТЕ ЗА ПРОВОДА НЕ ОТСОЕДИНЯТЬ, можно оторвать! Надо взять тонкий пинцет или отвертку и выталкивать их через две прорези в разъеме (можно поочередно, чуть-чуть вытолкнуть через прорезь слева, потом справа и т.д.). 8. Моторы крепятся двумя винтами, но их перекрывает сверху полукруглая пластиковая деталь с датчиками (это передние датчики бампера), она достаточно подвижна, ее можно отодвинуть за край чуть в сторону, и, придерживая, открутить два винта мотора. 9. Вынуть мотор, взять новый, для удобства, сразу вложить в него два винта, так же отодвинув мешающую деталь, поставить мотор и закрутить два винта. 8. Модуль колеса крепится на трех винтах, откручиваем их и вынимаем колесо. 9. Ставим новый модуль колеса на свое место и прикручиваем его.
Очень тщательно проверить провода, чтобы те не перекрывали отверстия, через которые пройдут винты, соединяющие обе половинки робота. Это провода: выключатель питания, динамика и два сквозных отверстия в материнской плате. Дисплей установить на плату в разъемы по белым меткам, а потом надеть верхнюю половинку робота. Если крышка при закрытии легла неплотно, ее надо снова снять и проверить не мешают ли провода (см.советы выше). Обязательно поправить дисплей (он обычно при открытии крышки выскакивает из разъемов) и снова ее закрыть.
информация из интернета.
СКАЧАТЬ ИНСТРУКЦИЯ ПО РЕМОНТУ РОБОТА ПЫЛЕСОСА PANDA X500 : Инструкция по ремонту робота пылесоса Panda Х500