- В России делают робота для ямочного ремонта дорог
- Студент Томского политехнического университета разработал робота для ремонта дорог
- Читайте также.
- Вступайте в наши группы и добавляйте нас в друзья 🙂
- Англичане разрабатывают беспилотного робота для ремонта дорог
- Роботов и дронов отправят ремонтировать дороги по ночам
- Робот для анализа дорожного покрытия в строительно-дорожных работах
- Библиографическое описание:
В России делают робота для ямочного ремонта дорог
Студенты Томского политехнического университета и Томского университета систем управления и радиоэлектроники разрабатывают робота, который сможет проводить ямочный ремонт дорог. Сейчас исследователи готовятся показать прототипы оригинального устройства, которое возьмет на себя рутинный труд дорожных рабочих.
Прототип для отработки машинного зрения
Робот-ремонтник будет сам ориентироваться на дороге и определять ее базовые элементы, такие как разметка, светофоры, дорожные знаки, при помощи технического зрения. Далее, подъехав к яме, робот определяет ее глубину и площадь и после этого заливает в выбоину специальную эмульсию, используя струйно-инъекционную эмульсию.
Сейчас студенты Томского университета разрабатывают два робота-прототипа. Один из них будет отрабатывать систему технического зрения, второй — механику движения. Исследователи отмечают, что их роботы уже умеют получать информацию с датчиков и распознавать базовые элементы.
Работа ведется в рамках программы «УМНИК-НТИ» Фонда содействия развитию малых форм предприятий в научно-технической сфере рассчитана на два года. За это время студенты намерены представить прототип робота, демонстрирующий все принципы работы. Реальный размер робота будет сопоставим с грузовиком КамАЗ, так как понадобится большая грузоподъемность для провоза эмульсий и щебня, но студенты представят прототип уменьшенного размера.
Источник
Студент Томского политехнического университета разработал робота для ремонта дорог

ТОМСК, 25 июля. /ТАСС/. Студент Томского политехнического университета (ТПУ) Всеволод Рачис разработал проект робота для мелкого ремонта дорожного покрытия. Об этом сообщает в понедельник пресс-служба проекта «ИНО Томск».
«Всеволод Рачис работал над проектом вместе со студентами Томского университета систем управления и радиоэлектроники (ТУСУР) около трех месяцев. По словам ребят, идея сделать робота-дорожника родилась у них во время поездки на автомобиле», — говорится в сообщении. Робот перемещается по дороге на колесах и ищет ямы с помощью камеры. Обнаружив повреждение дорожного покрытия, он сканирует его ультразвуковым датчиком, строит карту глубины, а потом засыпает яму специальной эмульсией.
Прототип робота был представлен на выставке Форума стратегических инициатив, который проходил на прошлой неделе на площадке ВВЦ в Москве. Рабочую модель Рачис вместе с коллегами планирует создать через год-два. По словам разработчика, робот сможет действовать на дорогах автономно. Однако, чтобы он не засыпал что-нибудь лишнее, на первом этапе при работе желательно присутствие человека.
Читайте также.
 В ТПУ разработали самый большой в России томограф для термоядерного реактора
В ТПУ разработали самый большой в России томограф для термоядерного реактора- Многофункциональные гусеничные машины SCARP на радиоуправлении из Санкт-Петербурга
- В Томске разработали новую конструкцию кабеля со светоотражающим эффектом
 В ТПУ разработали самый большой в России томограф для термоядерного реактора
В ТПУ разработали самый большой в России томограф для термоядерного реактора Многофункциональные гусеничные машины SCARP на радиоуправлении из Санкт-Петербурга
Многофункциональные гусеничные машины SCARP на радиоуправлении из Санкт-Петербурга В Томске разработали новую конструкцию кабеля со светоотражающим эффектом
В Томске разработали новую конструкцию кабеля со светоотражающим эффектомВступайте в наши группы и добавляйте нас в друзья 🙂
Ну наконец то. Вот уж чего надо в массовое производство запускать. Дорог у нас полно и их кач-во оставляет желать лучшего. Дорожники не успевают заплатки ставить. Тч робота-дорожника в автоматическом режиме и что-нибудь типа монтажной пены, но на основе пластика ему — пусть дыры заделывает и ровняет. Цены ему не будет.
Ну наконец то. Вот уж чего надо в массовое производство запускать.
еще робота чиновника чтобы не мешал работать роботу дорожнику и роботу дворнику, кстати я как специалист могу сказать что робот не доработан, т.к для качественного ямочного ремонта (который кстати крайне не эффективен сам по себе) необходимо:
1. Нарезать диском «карту» ремонта (сделать выбоину геометрически правильной)
2. Как можно тщательнее очистить рабочую поверхность от грязи и пыли
3. На сухо высушить поверхность
4. Хорошо пролить битумной эмульсией для обеспечения адгезии
5. Ну и собственно произвести укладку асфальтобетона в строгом соответствии с технологией
Собственно на практике выполняется только пункт № 1 и то не всегда…
Источник
Англичане разрабатывают беспилотного робота для ремонта дорог
Ливерпульский университет профинансировал разработанную компанией Robotiz3D роботизированную систему для эффективного ремонта дорожного покрытия.
Исследователи подсчитали, что ежегодно Великобритания тратит на обслуживание дорог около $1,3 млрд. Такие огромные расходы в значительной степени обусловлены применением ручного труда. Поэтому для ускорения коммерциализации проекта, Лаборатория инженерной робототехники университета передала права на свои разработки в этом направлении в частные руки.
Компания Robotiz3D будет использовать запатентованные учеными модели искусственного интеллекта и роботизированных систем для создания автономного робота ARRES. Он сможет самостоятельно обнаруживать дефекты дорожного покрытия, оценивать их значимость и при необходимости исправлять. По словам разработчиков, система будет не только ликвидировать выбоины, но и предотвращать их образование на этапе появления трещин покрытия.
Ливерпульский университет ожидает, что новая технология значительно уменьшит стоимость и время ремонта дорог, а также повысит безопасность и экологичность процесса по сравнению с применяемыми сегодня методами.
Помимо новых решений для обслуживания, исследователи также совершенствуют и сами покрытия. Ранее мы сообщали о разработке амортизирующего асфальта для тротуаров и велодорожек, который значительно сокращает уровень травматизма от падений.
Для развития канала нам важна ваша поддержка, подписывайтесь на канал и ставьте лайки.
Источник
Роботов и дронов отправят ремонтировать дороги по ночам

Для живущих на среднем западе американцев три сезона в году представляются сплошной зимой, а четвертый (лето) впору назвать ремонтом автодорог. Значительная часть дорожных работ, происходящих в теплое время года, связана с латанием дыр, которые появились в холодные месяцы года.
Очевидно, что эти необходимые работы гораздо проще выполнять в течение рабочего дня, но при этом приходится испытывать терпение водителей из-за замедления транспортного потока.
Эксперты из университетского колледжа Лондона (UCL) и университета Лидса разрабатывают технологии, которые помогли бы сместить эти работы по ремонту поврежденных дорог на ночное время. Проект из области фантастики предполагает использование по ночам в качестве дорожных рабочих автономных роботов, смонтированных на дронах.
«Это не просто научный проект, — сказал профессор Филипп Пернелл. — Это социально-экономическая программа». Он пояснил, что этот проект сделает перемещение по дорогам для водителей более удобным, а также станет экзаменом как экономических, так и социальных последствий использования роботов для ремонта дорог вместо людей.
В ближайшие несколько лет такие роботы должны будут испытываться на британских улицах, сканируя поверхность асфальта, чтобы найти мелкие трещины, которые могут вырасти в более крупные. Затем они могут подползти или подлететь к трещинам и менее чем за одну минуту запечатать их асфальтом, прежде чем трещины получат шанс увеличиться в размерах. Роботы будут работать в ночное время, чтобы меньше затруднять движение транспорта.
Уже не в первый раз технология 3D-печати будет использована для ремонта поврежденных участков дорог, но этот проект фактически является частью расширенной инициативы по созданию в Лидсе структуры так называемого «самовосстанавливающегося города». Целью проекта является сведение к нулю к 2050 году вызванных дорожными работами перерывов в движении путем разработки роботов, которые могли бы выявлять, диагностировать и устранять такие проблемы на дорогах, как выбоины, с помощью малоинвазивных методов.
В настоящее время уже наполовину реализован пятилетний план UCL и группы из Лидса, который завершится испытанием на улицах Лидса прилетевших на дронах роботов со специальными 3D-принтерами для закатки дыр на асфальте.
Источник
Робот для анализа дорожного покрытия в строительно-дорожных работах
Рубрика: Технические науки
Дата публикации: 26.12.2015 2015-12-26
Статья просмотрена: 404 раза
Библиографическое описание:
Поезжаева, Е. В. Робот для анализа дорожного покрытия в строительно-дорожных работах / Е. В. Поезжаева, К. Н. Поликарпова, А. А. Новикова, В. А. Сайкинова. — Текст : непосредственный // Молодой ученый. — 2016. — № 1 (105). — С. 200-203. — URL: https://moluch.ru/archive/105/24821/ (дата обращения: 04.07.2021).

В настоящее время стоит вопрос об обеспечении качественного и долгослужащего дорожного покрытия, в частности, на автомобильных дорогах. Разработан робот, позволяющий с высокой точностью определить и полностью анализировать качество дорожного покрытия на заданном участке путем определения сцепных качеств и прочности дорожных одежд.
Ключевые слова: робот, анализ дорожного покрытия, строительно-дорожные работы, повышение качества
В наше время опыт эксплуатации автомобильных дорог показывает, что существующий нормативный срок их службы в течение 13–15 лет не выдерживается по разным причинам. Снижение срока службы автомобильных дорог вызвано многими факторами, в том числе и отсутствием полноценного контроля качества производства работ на всех этапах технологического процесса строительства дорог.
Важность операционного контроля обусловливает возможность коррекции той или иной технологической операции, что приводит в целом к повышению качества производства работ и срока службы автомобильной дороги.
В частности, решим проблему контроля качества готового дорожного покрытия определением соответствия свойств асфальтобетона требованиям стандартов, определения фактической толщины покрытия, коэффициента уплотнения и прочности сцепления слоев.

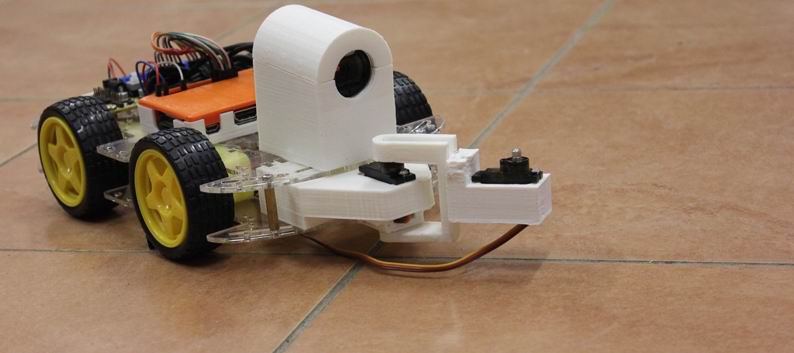
Рис. 1. Робот на четырехколесной платформе
В современных лабораториях проверка свойств асфальтобетона происходит в течение 3–5 дней. Более рационально использовать роботов, которые смогут анализировать дорожное покрытие и прямо на месте вынести свою оценку данному участку дороги.
Предлагается за основу взять робот со следящей системой.
Предполагается размещение на каждом узле сервомеханизма, эффективно контролирующего фактическое положение узла и положения, которое контроллер «хочет», чтобы узел занял. Затем звено манипулятора со схватом перемещается до тех пор, пока положения с узлом не совпадут. Роботы со следящей системой и обратной связью дают информацию о действительном положении того или иного узла. Иначе рука робота может где-нибудь застрять или совсем перестать двигаться, что значительно сужает сферу их применения.

Рис. 2. Плотномер ПА-МГ4
Рис. 3. Прибор для определения шероховатости дорожного покрытия КП-139

Рис. 4. Прибор для измерения толщин слоев дорожного покрытия
Звено манипулятора, прикрепленное к платформе, снабженное видеокамерами и специальным рабочим органом, которым может произвести сканирование некоторого участка дорожного покрытия. Оно приводится в движение электрическим приводом в заранее запрограммированной последовательности движений под управлением контроллера (управляющего устройства), который основан на микропроцессоре.
Для предполагаемого робота, который будет эксплуатироваться в достаточно простых по проходимости условиях, наиболее выгодно использовать четырехколесную платформу.
Мини-лаборатория, выполняющая главную задачу робота, включает в себя:
- плотномер асфальтобетона ПА-МГ4, для определения коэффициента уплотнения и степени плотности верхнего слоя асфальтобетона (рис.2);
- приспособление для определения шероховатости дорожных покрытий по методу “песчаного пятна” КП-139 (рис.3);
- прибор для измерения толщины слоев дорожногопокрытияMIT-SCAN-T2 (рис.4).
Основываясь на встроенной базе данных, робот определяет соответствие качества данного дорожного покрытия ГОСТу. Результаты исследования предлагается записывать на твердотельный накопитель с помощью какого-либо микропроцессора.
В связи со сложностью и существенной нелинейностью динамических характеристик манипуляционного робота проблема оптимального контурного управления такой системой является чрезвычайно трудной. Задача упрощается при ее решении в два этапа. На первом этапе до начала движения осуществляется планирование оптимальной траектории движения по заданной геометрической траектории как функции времени, а на втором в реальном времени осуществляется отслеживание полученного движения. Для того, чтобы робот мог достаточно точно отследить сформированную траекторию, на этапе планирования необходимо располагать точным значением динамики манипуляционной системы. Однако на практике инерционные характеристики объекта манипулирования часто бывают неизвестны.
Динамика манипуляционного робота в тензорных обозначениях может быть описана уравнением [1]:
 (1)
(1)
где  — i-тая обобщенная сила;
— i-тая обобщенная сила;  — i-тая обобщенная координата;
— i-тая обобщенная координата;  — матрица инерции;
— матрица инерции;  — массив кориолисовых коэффициентов, определяемый выражением
— массив кориолисовых коэффициентов, определяемый выражением
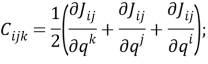 (2)
(2)
 — матрица вязкого трения;
— матрица вязкого трения;  — сила тяжести. Матрица инерции , массив кориолисовых коэффициентов и вектор являются функциями положения манипулятора и матрицы псевдоинерции объекта манипулирования, включающей в себя массу, первые и вторые моменты объекта моделирования.
— сила тяжести. Матрица инерции , массив кориолисовых коэффициентов и вектор являются функциями положения манипулятора и матрицы псевдоинерции объекта манипулирования, включающей в себя массу, первые и вторые моменты объекта моделирования.
Желаемая геометрическая траектория задается в конфигурационном пространстве в параметрической форме, т. е. все координаты  , характеризующие перемещения в степенях подвижности манипулятора, выражаются через единственный параметр
, характеризующие перемещения в степенях подвижности манипулятора, выражаются через единственный параметр  [2]:
[2]:
 (3)
(3)
При такой форме представления появляется возможность выразить положения, скорости и ускорения в степенях подвижности через параметр и его производные по времени. Подставляя эти соотношения в уравнение динамики (1), можно получить
 (4)
(4)
где  — псевдоскорость. Если объект манипулирования имеет некоторую номинальную матрицу псевдоинерции
— псевдоскорость. Если объект манипулирования имеет некоторую номинальную матрицу псевдоинерции  , то уравнение (4) можно представить в форме
, то уравнение (4) можно представить в форме
 (5)
(5)



Если инерционные характеристики объекта манипулирования отличаются от нормальных, то возмущённое уравнение динамики можно представить в виде
 (6)
(6)
Для того, чтобы требуемые моменты не превысили возможностей приводов, нужно выбрать такие  и
и  , что при отклонениях
, что при отклонениях  в известных пределах величина момента
в известных пределах величина момента  , определенного выражением (6). Остается реализуемой, т. е.
, определенного выражением (6). Остается реализуемой, т. е.
 (7)
(7)
Также могут быть наложены ограничения на скорость изменения этого момента, как функции положения, скоростей и ускорений
 (8)
(8)
где  — константа.
— константа.
Способ формирования податливого движения основан на изменении жесткости схвата манипулятора. Соответствующая концепция управления учитывает жесткость манипулятора в виде матрицы сил, воздействующих на схват при отклонении его от номинального положения. Стабилизация инерционных сил производится специальной системой.
Спроектированная модель робота, обеспечивает вопрос высокой точности и прочности дорожного покрытия.
- Поезжаева Е.В// Промышленные роботы: учеб.пособие: в 3 ч. / Е. В. Поезжаева. — Пермь: Изд-во Перм. Гос. техн. ун-та, 2009.-Ч.2.-185.
- Поезжаева Е.В// Теория механизмов и механика систем машин. / Е. В. Поезжаева. — Пермь: Изд-во Перм. Гос. техн. ун-та, 2015.-400.
Источник