- Чинят трубы и ищут утечки: как работают роботы в сфере ЖКХ
- Водопроводные роботы
- Марсоходы ливневой канализации
- Интеллектуальная система слежения
- Роботы для телеинспекции и бестраншейного ремонта трубопроводов
- Роботы для телеинспекции и бестраншейного ремонта трубопроводов
- Роботы для телеинспекции и бестраншейного ремонта трубопроводов
Чинят трубы и ищут утечки: как работают роботы в сфере ЖКХ
(11).jpg)
Роботизация жилищно-коммунального хозяйства столицы — тренд, набирающий популярность в последние годы. На городской службе появляется все больше автоматизированных систем и технологий, которые позволяют снимать нагрузку с людей. Роботы берут на себя физически трудные и вредные для здоровья человека задачи, повышая безопасность и эффективность работы сотрудников коммунальных служб.
«Инновации в ЖКХ определяют перспективы развития отрасли в ближайшем будущем. Мы активно внедряем новые технологии для того, чтобы обеспечить слаженную работу всех городских служб, повысить качество и безопасность на местах, а также сократить сроки выполнения сложнейших задач. На данном этапе эти задачи являются системообразующими. В конечном итоге от результатов этой работы зависит то, насколько комфортно жители ощущают себя в городской среде», — отметил руководитель Департамента жилищно-коммунального хозяйства города Москвы Александр Соловьев.
Водопроводные роботы
Целый парк роботов находится на службе у Мосводоканала. Они могут ездить и плавать, проникая в труднодоступные участки труб. Такие устройства помогают ремонтировать водопроводные сети и следить за состоянием систем водоснабжения столицы.
(1).jpg)
Обследование подземных коммуникаций проходит в несколько этапов. Сначала специалисты Мосводоканала определяют участок, который необходимо проверить, и конкретные места для запуска робота. После этого машину опускают в трубу, а инженер занимает место в центре управления и смотрит на мониторе трансляцию изображения с камеры. Специалист управляет им в режиме реального времени с помощью джойстика. Затем записанное видео анализируют и выявляют наиболее проблемные места в системе коммуникаций. Такая диагностика позволяет оценить внутреннее состояние трубопроводов: обнаружить трещины и отслоение покрытий, неровности, сколы, оценить качество монтажа стыков и наличие посторонних предметов. Дефекты и повреждения оперативно устраняют. По итогам проводят контрольное обследование участка.
Для мониторинга канализационных трубопроводов, частично заполненных сточными водами, Мосводоканал использует робота на специальном плоту. Он оснащен вращающейся камерой, системой дополнительного освещения, а также устройством наведения.
.jpg)
Роботы также способны ремонтировать трубопровод: с помощью специальных насадок они очищают трубы и накладывают на проблемные участки металлические заплатки. Кроме того, эти машины способны оценивать герметичность соединений.
Марсоходы ливневой канализации
Мосводосток использует современные технологии для контроля за состоянием дождевой канализации. Робототехнический комплекс P-200 обследует водосточные коллекторы, помогая подготовить город к обильным осадкам. Машина исследует водосточные трубы малого диаметра и другие труднодоступные для человека участки. Роботом управляют сотрудники отдела телеинспекции трубопроводов, которые регулярно проводят мониторинг подземных коллекторов и выявляют наиболее уязвимые места на ранних этапах, когда нужно минимальное вмешательство.

Комплекс P-200 — это небольшое устройство на колесах, оснащенное подсветкой и видеокамерами, которые могут поворачиваться на 360 градусов. Впервые эту модель применили в 2004 году. Их называют марсоходами столичной ливневой канализации. Машины управляются дистанционно (с поверхности). Для этого в специальном автомобиле оборудована рабочая станция CD-3 с графическим интерфейсом и системой управления самоходным роботом. Диаметр труб, которые робот способен обследовать, варьируется от 200 до 1800 миллиметров.
Перед тем как отправить робота под землю, его корпус заполняют сухим азотом. Это нужно для обеспечения герметичности, чтобы внутри машины не собирался конденсат. Для обследования труднодоступных участков на корпусе робота есть привод подъема видеокамеры. Сама камера оснащена 10-кратным оптическим зумом, благодаря чему способна фиксировать любые дефекты. Для обследования частично заполненных самотечных коллекторов робот P-200 дооснащается плавающим модулем и цветной поворотной камерой. Это необходимо для обследования скважин глубиной 400 метров и более.

Благодаря установленным датчикам уклона робот способен также определять профиль залегания трубопровода. В случае нарушения герметичности корпуса о неполадках сообщит датчик избыточного давления азота.
Интеллектуальная система слежения
В 2019 году Мосгаз открыл современный инженерный центр. В нем разместилась центральная диспетчерская, оснащенная современными аппаратно-программными комплексами реагирования, которые значительно расширили возможности диспетчеров по управлению системой газоснабжения и решению нештатных ситуаций. Специалисты могут получать оперативную информацию о состоянии газовой инфраструктуры, координировать и оценивать работу выездных бригад по заявкам москвичей.
Интеллектуальная система реагирования позволяет не только за несколько секунд точно определить место инцидента, но и дистанционно закрыть запорные устройства, в автоматическом режиме сформировать список отключаемых объектов.
(1).jpg)
В диспетчерской в режиме онлайн отображаются текущие параметры работы газорегуляторных пунктов, такие как входное и выходное давление, температура помещения. В базе данных хранятся технологические схемы газорегулирующего оборудования и ТЭЦ. Таким образом, диспетчеры получают полную информацию обо всех плановых и аварийных работах на газовых сетях и о состоянии газорегулирующего оборудования.
У видеостены есть разные режимы демонстрации информации — для штатных и экстренных ситуаций. Работу информационной системы диспетчерской обеспечивает современная серверная. Программное обеспечение диспетчерской является собственной оригинальной разработкой Мосгаза.
Источник
Роботы для телеинспекции и бестраншейного ремонта трубопроводов
В данной статье рассматривается применение самоходных телевизионных роботов с функциями фрезерования и заделки трубопроводов изнутри (при помощи шпателя с полимерным составом или пакера с круговым внутренним бандажом) в техпроцессе бестраншейного ремонта коммунальных трубопроводов различными методами, такими, как протяжка полиэтиленовой трубы внутри старого стального трубопровода, или санация полимерным рукавом (методом Инситуформ и другими), или напыление полимера или нанесение внутреннего цементно-песчаного покрытия и т.д.
 При проведении работ по бестраншейной санации водопровода, канализации или газопровода нередко возникает необходимость использования самоходных телеинспекционных и ремонтных роботов.
При проведении работ по бестраншейной санации водопровода, канализации или газопровода нередко возникает необходимость использования самоходных телеинспекционных и ремонтных роботов.
Прежде всего, нужно упомянуть, что перед проведением бестраншейного ремонта трубопровода необходимо провести телеинспекцию участков, подлежащих ремонту. Это поможет получить достоверную информацию о внутреннем состоянии трубопровода, принять правильное решение о способе ремонта и об объеме предстоящих работ. После завершения работ по санации также проводят телеинспекцию для проверки качества выполненных работ и предъявления результатов заказчику.
 Указанные работы выполняют, как правило, самоходными роботами для телеинспекции, которые не имеют других (ремонтных) функций и возможностей. Это связано с тем, что роботы для телеинспекции легче, компактнее, дешевле и удобнее при выполнении видеодиагностики трубопровода, чем ремонтные роботы, кроме того, роботы для телеинспекции имею значительно более легкий и тонкий кабель, чем роботы для фрезерования или внутренней заделки трубы.
Указанные работы выполняют, как правило, самоходными роботами для телеинспекции, которые не имеют других (ремонтных) функций и возможностей. Это связано с тем, что роботы для телеинспекции легче, компактнее, дешевле и удобнее при выполнении видеодиагностики трубопровода, чем ремонтные роботы, кроме того, роботы для телеинспекции имею значительно более легкий и тонкий кабель, чем роботы для фрезерования или внутренней заделки трубы.
По результатам видеообследования на подлежащем ремонту участке трубопровода выявляются места, создающие проблемы для того или иного вида санации. Это могут быть металлические ремонтные штыри (чопы) или острый грат на сварном шве стального трубопровода, или торчащая арматура и куски бетона в железобетонном трубопроводе, или другие выступы и неровности, препятствующие всем упомянутым выше методам санации. Кроме того, это могут быть сквозные отверстия большого диаметра, которые делают невозможным ремонт цементно-песчаной облицовкой или напылением полимера (а при особенно больших отверстиях и санацию полимерным рукавом).
Ремонт таких проблемных мест возможен разными способами. Например, ремонтные штыри (чопы) можно вырвать скребком при прочистке (нужно учитывать, что после этого останутся большие отверстия), либо любой дефект можно устранить путем локальной раскопки. Но очевидно, что большое количество дополнительных раскопок дискредитирует сам метод бестраншейного ремонта. Кроме того, во многих случаях раскопка в месте дефекта может быть трудно организуема или невозможна (если над местом дефекта проходит автотрасса или трамвайные пути и т.п.). Для решения таких задач и были созданы ремонтные роботы.
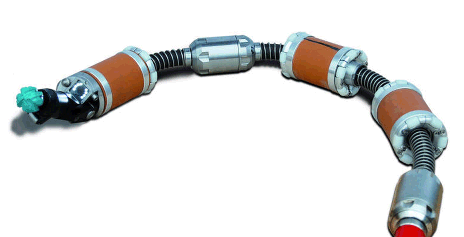
Под ремонтными роботами понимают оборудование, способное проходить по трубопроводу расстояние в десятки или сотни метров и выполнять в трубопроводе различные виды ремонтных работ. Ремонтные роботы вводятся в трубопровод через колодец, если речь идет о самотечной канализации, либо через вырезку в трубе в колодце (или сделанном для этого котловане), если речь идет о напорном водопроводе или газопроводе и т.п. Управление ремонтными роботами осуществляется по кабелю от поста управления, который находится в автомобиле, располагаемом в непосредственной близости от колодца или котлована. Функционально ремонтные роботы можно разделить на роботы для выполнения фрезерных и заделочных работ.
Под заделочными работами при этом понимаются замазка (заделка) внутренней поверхности трубопровода полимерными материалами при помощи дистанционно управляемого шпателя того или иного вида или другого приспособления.
 В отдельную группу заделочных роботов можно выделить системы телеинспекции трубопроводов, оснащенные пневматическим «пакерами» для установки на внутреннюю поверхность труб бандажей из стеклоткани с полимерным составом, либо ленты нержавеющей стали с резиновой прокладкой для заделки отверстий и прочих дефектов.
В отдельную группу заделочных роботов можно выделить системы телеинспекции трубопроводов, оснащенные пневматическим «пакерами» для установки на внутреннюю поверхность труб бандажей из стеклоткани с полимерным составом, либо ленты нержавеющей стали с резиновой прокладкой для заделки отверстий и прочих дефектов.
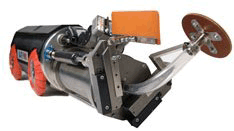
Под фрезерными работами понимаются подрезка выступающих элементов, зачистка, фрезерование, шлифование, вырезка отверстий и т.д. При этом используются такие инструменты, как фрезы (различной формы и из различных материалов, в зависимости от назначения), отрезные или шлифовальные круги, металлические щетки и прочее. Основным элементом фрезерного робота является шпиндель, который может быть пневматическим, гидравлическим или электрическим.
На сегодня фрезерные и заделочные роботы способны обслуживать широкий диапазон диаметров трубопроводов – от 100 мм до 900 мм.
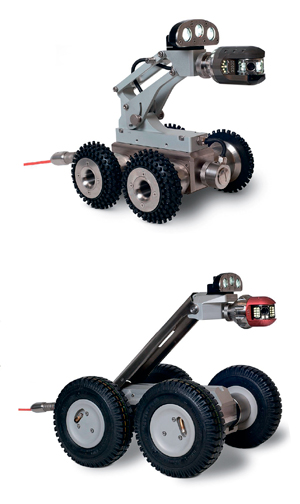
Как фрезерные, так и заделочные роботы имеют в своем составе видеокамеру и колесный движитель для перемещения по трубопроводу. Как правило, в системе фрезерного робота есть еще система подачи воды на режущий инструмент (для его охлаждения), а также на стекло видеокамеры – для ее очистки от продуктов фрезерования (пыли и грязи).
Более подробно возможности и характеристики ремонтных роботов представлены в статьях:
— Телевизионные фрезерные роботы для бестраншейной санации трубопроводов
— Телевизионные заделочные роботы и пакеры для бестраншейного ремонта трубопроводов
Видео: Роботы для бестраншейного ремонта трубопроводов.
Источник
Роботы для телеинспекции и бестраншейного ремонта трубопроводов
В статье рассматривается применение самоходных телевизионных роботов с функциями фрезерования и заделки трубопроводов изнутри (при помощи шпателя с полимерным составом или пакера с круговым внутренним бандажом) в техпроцессе бестраншейного ремонта коммунальных трубопроводов различными методами, такими как протяжка полиэтиленовой трубы внутри старого стального трубопровода, или санация полимерным рукавом (методом «Инситуформ» и другими), или напыление полимера либо внутреннего цементно-песчаного покрытия и т. д.
Роботы для телеинспекции и бестраншейного ремонта трубопроводов
В статье рассматривается применение самоходных телевизионных роботов с функциями фрезерования и заделки трубопроводов изнутри (при помощи шпателя с полимерным составом или пакера с круговым внутренним бандажом) в техпроцессе бестраншейного ремонта коммунальных трубопроводов различными методами, такими как протяжка полиэтиленовой трубы внутри старого стального трубопровода, или санация полимерным рукавом (методом «Инситуформ» и другими), или напыление полимера либо внутреннего цементно-песчаного покрытия и т. д.

При проведении работ по бестраншейной санации водопровода, канализации или газопровода нередко возникает необходимость использования самоходных телеинспекционных и ремонтных роботов.
Прежде всего нужно упомянуть, что перед проведением бестраншейного ремонта трубопровода необходимо провести телеинспекцию участков, подлежащих ремонту. Это поможет получить достоверную информацию о внутреннем состоянии трубопровода, принять правильное решение о способе ремонта и объеме предстоящих работ. После завершения работ по санации также проводят телеинспекцию для проверки качества выполненных работ и предъявления результатов заказчику.
Указанные работы выполняют, как правило, самоходными роботами для телеинспекции, которые не имеют других (ремонтных) функций и возможностей. Это связано с тем, что роботы для телеинспекции легче, компактнее, дешевле и удобнее при выполнении видеодиагностики трубопровода, чем ремонтные роботы. Кроме того, роботы для телеинспекции имеют значительно более легкий и тонкий кабель, чем роботы для фрезерования или внутренней заделки трубы.
По результатам видеообследования на подлежащем ремонту участке трубопровода выявляются места, создающие проблемы для того или иного вида санации. Это могут быть металлические ремонтные штыри (чопы), или острый грат на сварном шве стального трубопровода, или торчащая арматура и куски бетона в железобетонном трубопроводе, или другие выступы и неровности, препятствующие всем упомянутым выше методам санации, а также сквозные отверстия большого диаметра, которые делают невозможным ремонт цементно-песчаной облицовкой или напылением полимера, а при особенно больших отверстиях и санацию полимерным рукавом.
Ремонт таких проблемных мест возможен разными способами. Например, ремонтные штыри (чопы) можно вырвать скребком при прочистке (нужно учитывать, что после этого останутся большие отверстия), а любой дефект можно устранить путем локальной раскопки. Но очевидно, что большое количество дополнительных раскопок дискредитирует сам метод бестраншейного ремонта. Кроме того, во многих случаях раскопка в месте дефекта может быть трудно организуема или невозможна (если над местом дефекта проходят автотрасса или трамвайные пути и т. п.). Для решения таких задач и были созданы ремонтные роботы.
Под ремонтными роботами понимают оборудование, способное проходить по трубопроводу расстояние в десятки или даже сотни метров и выполнять в трубопроводе различные виды ремонтных работ. Ремонтные роботы вводятся в трубопровод через колодец, если речь идет о самотечной канализации, либо через вырезку в трубе в колодце (или сделанном для этого котловане), если речь идет о напорном водопроводе или газопроводе и т. п. Управление ремонтными роботами осуществляется по кабелю от поста управления, который находится в автомобиле, располагаемом в непосредственной близости от колодца или котлована. Функционально ремонтные роботы можно разделить на роботы для выполнения фрезерных и заделочных работ.
Под заделочными работами при этом понимаются замазка (заделка) внутренней поверхности трубопровода полимерными материалами при помощи дистанционно управляемого шпателя того или иного вида или другого приспособления.
В отдельную группу заделочных роботов можно выделить системы телеинспекции трубопроводов, оснащенные пневматическим пакерами для установки на внутреннюю поверхность труб бандажей из стеклоткани с полимерным составом, либо ленты из нержавеющей стали с резиновой прокладкой для заделки отверстий и прочих дефектов.
Под фрезерными работами понимаются: подрезка выступающих элементов, зачистка, фрезерование, шлифование, вырезка отверстий и т. д. При этом используются такие инструменты, как фрезы (различной формы и из различных материалов в зависимости от назначения), отрезные или шлифовальные круги, металлические щетки и пр. Основным элементом фрезерного робота является шпиндель, который может быть пневматическим, гидравлическим или электрическим.
На сегодня фрезерные и заделочные роботы способны обслуживать широкий диапазон диаметров трубопроводов – от 100 до 900 мм.
Как фрезерные, так и заделочные роботы имеют в своем составе видеокамеру и колесный движитель для перемещения по трубопроводу. Как правило, в системе фрезерного робота есть еще система подачи воды на режущий инструмент (для его охлаждения), а также на стекло видеокамеры – для ее очистки от продуктов фрезерования (пыли и грязи).
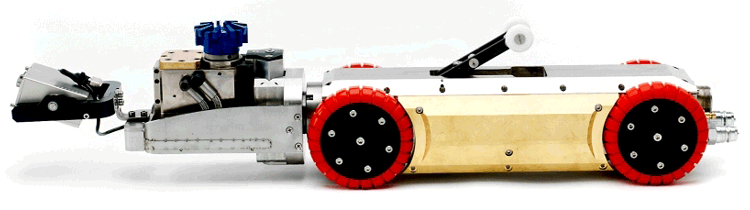
Как правило, фрезерный робот для трубопроводов представляет собой самоходную тележку, оснащенную фрезерной головкой и видеокамерой, управляемую по специальному комбинированному кабелю из автомобиля-лаборатории и способную перемещаться по трубопроводу и выполнять фрезерные и подрезные работы, а также локальную зачистку в трубопроводе.
Можно оговориться, что в самом начале появления фрезерных роботов они были значительно проще и у ряда производителей представляли собой просто пневматическую фрезерную головку, перемещаемую при помощи электроприводов по трем координатам (горизонталь, вертикаль и ротация), устанавливаемую на салазках и протаскиваемую по трубопроводу тросом.
Такой простейший робот был без видеокамеры и при выполнении фрезерных работ использовалась какая-либо сторонняя система телеинспекции, вводимая в трубопровод с другого конца обследуемого участка. Однако сейчас большинство производителей отказались от таких простых систем и предлагают полноценные робототехнические системы, способные выполнять все необходимые для работы функции.
У современного фрезерного робота также присутствует фрезерная головка с трехкоординатным электрическим приводом ее перемещения. Сегодня традиционно используются пневматические и гидравлические фрезерные головки, кроме того, все большую популярность приобретают электрические фрезерные головки, которые являются наиболее перспективными.
Мощность фрезерной головки является одной из важнейших характеристик фрезерного робота. Ниже приведен пример мощностей различных шпинделей фрезерных головок, предлагаемых одним из ведущих производителей (табл. 1).
| Таблица 1 Пример мощностей различных шпинделей фрезерных головок | |||||||||||||||||||||||||
| |||||||||||||||||||||||||
Недостатками пневматического шпинделя являются низкий КПД и необходимость использования мощного компрессора. Однако при этом для самых малых диаметров труб (от 100 мм) альтернативы пневматическому шпинделя не существует. Недостатками гидравлического шпинделя являются опасность утечки рабочей жидкости и попадания ее в трубопровод (что особенно критично для водопровода), а также высокая стоимость (с учетом дорогостоящей гидростанции). Ранее электрический шпиндель малых габаритов сильно отставал от пневматического и гидравлического по мощности, но сейчас они достаточно близки, хотя преимущество по данному параметру остается за гидравликой. Кроме того, при применении электрического шпинделя возможно использование более тонкого комбинированного кабеля, так как не требуется наличия в нем гидравлических и пневматических шлангов.
Видеокамера фрезерного робота может смотреть как вперед, так и на рабочий инструмент (фрезу). Видеокамеры фрезерных роботов обычно оснащают стеклоочистителем и (или) системой подачи воды на стекло видеокамеры – для его очистки от продуктов фрезерования. Фрезерным роботом можно делать и телеинспекцию трубопровода, однако использовать его под эту задачу не рекомендуется, так как есть более дешевые и удобные специализированные системы телеинспекции.
Фрезерный робот для бестраншейной санации, как правило, оснащают приводом упора (пневматическим или электрическим), который обеспечивает жесткую фиксацию робота в трубопроводе во время фрезерования. Иногда привод упора совмещают с верхними колесами, при этом робот, распертый в трубопроводе (за счет верхних колес, с усилием прижимаемых к верхнему своду трубы), может двигаться по трубопроводу при помощи собственного привода перемещения. В этом случае сила тяги робота увеличивается, и он может протащить тяжелый кабель на значительно большее расстояние.
Некоторые производители конструктивно разделяют фрезерную головку (не самоходную, на пассивных колесах) и движитель – отдельный механизм, предназначенный для перемещения фрезерной головки по трубе. Такая система позволяет еще больше повысить тяговое усилие. Кроме того, один движитель можно использовать и для фрезерной головки, и для заделочной головки со шпателем. Задачи фрезерных роботов представлены в табл. 2.
| Таблица 2 Задачи фрезерных роботов | ||||||||
| ||||||||
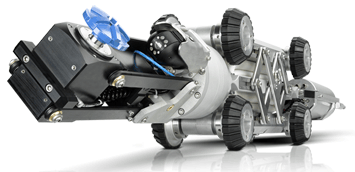
Заделочный робот представляет собой самоходную тележку с заделочной головкой (шпателем или устройством заделки стыков в тройниках и т. п.), оснащенную видеокамерой и управляемую по кабелю от поста управления, находящегося в автомобиле.
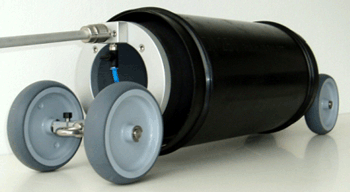
Пакер представляет собой надувной пневматический цилиндр из прочной резины, установленный на пассивные колеса, работающий совместно с самоходным роботом для телеинспекции трубопроводов или с другой системой телеинспекции, перемещаемый по трубопроводу при помощи робота для телеинспекции или проталкиваемый сборными штангами. Существуют относительно короткие пакеры (длиной до 500 мм) и длинные гибкие пакеры – до нескольких метров.
Короткие пакеры, как правило, применяются для установки бандажей из ленты из нержавеющей стали с резиновым уплотнением и используются как на канализации, так и на водопроводе.
| Таблица 3 Задачи заделочных роботов и пакеров | ||||||||
| ||||||||