608 Эффективные методы использования динамического стабилизатора пути
М.В.ПОПОВИЧ, В.Л.БОНДАРЬ, Б.Г.ВОЛКОВОЙНОВ
Стабилизированное состояние балластного слоя достигается взаимосвязанными технологическими операциями по выправке пути, уплотнению балластной призмы в подшпальной, откосно-плечевой и междупутной зонах. Цель такого комплекса работ — обеспечить упругость деформаций и предсказуемость поведения балласта при эксплуатации.
Ресурсосберегающие технологии ремонтов и текущего содержания пути предусматривают использование для объемного уплотнения балласта динамических стабилизаторов пути (ДСП). В результате работы ДСП степень уплотнения подшпальной зоны слоя такова, как при стабилизации после пропуска поездов.
В мировой практике накоплен большой опыт создания и эксплуатации ДСП на дорогах в различных условиях. Отечественные ученые и практики еще в 40-е годы предлагали конструкторские разработки машин для динамической стабилизации пути с передачей вертикальных вибрационных нагрузок через колесные пары. В 50-е годы ЦНИИ МПС провел серию экспериментов по вертикальному вибрационному воздействию на балластный слой через путевую решетку. В результате была доказана эффективность такого способа уплотнения. В силу ряда причин в то время не удалось довести начатые разработки до широкого внедрения.
ВНИИЖТ и транспортные вузы страны исследовали в своих научно-прикладных работах различные процессы, происходящие в балластном слое при уплотняющих воздействиях на него. Это позволило в данной статье провести качественную оценку технологических свойств рабочих органов ДСП, которые работают в различных режимах силового воздействия.
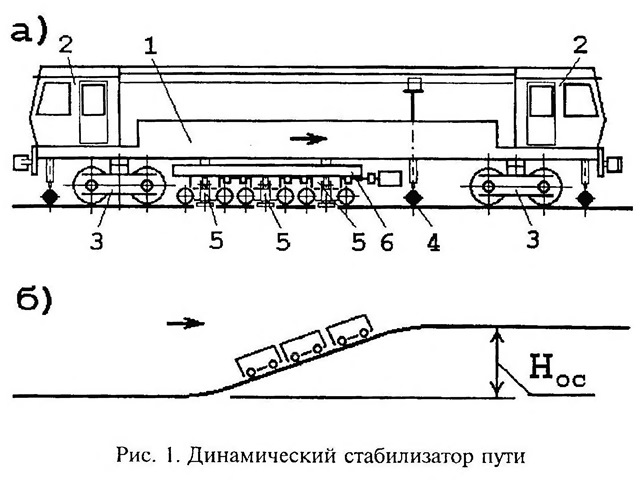
Общая схема ДСП показана на рис. 1 ,а. Он состоит из корпуса 1 с силовой установкой, трансмиссией, гидропневмооборудованием, и кабины управления 2. Корпус опирается на ходовые тележки 3 с приводными и неприводными колесными парами. Машина оборудуется системой 4 для контроля положения пути по уровню и продольного профиля. В отдельных случаях к ДСП дополнительно прицепляют двухосную платформу (на рис. 1 не показана), которая служит базой для размещения системы предварительной оценки геометрического положения пути.
Рабочий орган ДСП содержит три виброблока 5, опирающиеся через пневматические амортизаторы на промежуточную раму 6. Виброприводы блоков — де-балансные, соединенные с гидромотором и синхронизированные промежуточными карданными валами. Прижим виброблоков и их вертикальное перемещение из рабочего в транспортное положение и обратно осуществляют вертикальные гидроцилиндры.
Так устроен ДСП производства Екатеринбургского филиала Унитарного предприятия Калужский завод «Ремпутьмаш», построенный по проекту ЦКБпутьмаш.
Схема, поясняющая работу ДСП, показана на рис.
1,6. Как видно из рисунка, при непрерывном движении стабилизатора происходит силовое вибрационное воздействие через путевую решетку на балластный слой, вследствие чего осадка пути вместе с решеткой достигает Нос.
Характерные схемы сочетания направлений колебаний виброблока рабочего органа и вертикального прижима показаны на рис. 2. Схема на рис. 2,а соответствует силовому воздействию с вертикальными вибрированием и прижимом. Во ВНИИЖТс была проведена серия экспериментов с выправочно-стаби-лизирующей установкой, оборудованной эксцентриковым приводом вибраций, на пути с рельсами Р65 и различными типами подрельсового основания. Доказано, что вертикальная составляющая вибрирования позволяет достичь более эффективного стабилизирующего воздействия при меньшей энергоемкости (в 1,25—1,3 раза). Это объясняется тем, что в течение периода колебаний штамп (в данном случае — подошв шпал) отрывается от поверхности балластного слоя с последующим ударом по ней. В момент отрыва шпал от балласта происходит взаимное пассивное смещение частиц под действием сил упругости и тяжести в результате снижения сил внутреннего трения, а при ударе внутри слоя распространяются фронты волн упругих колебаний, приводящие к активным смещениям частиц, сопровождающимся их уплотнением.
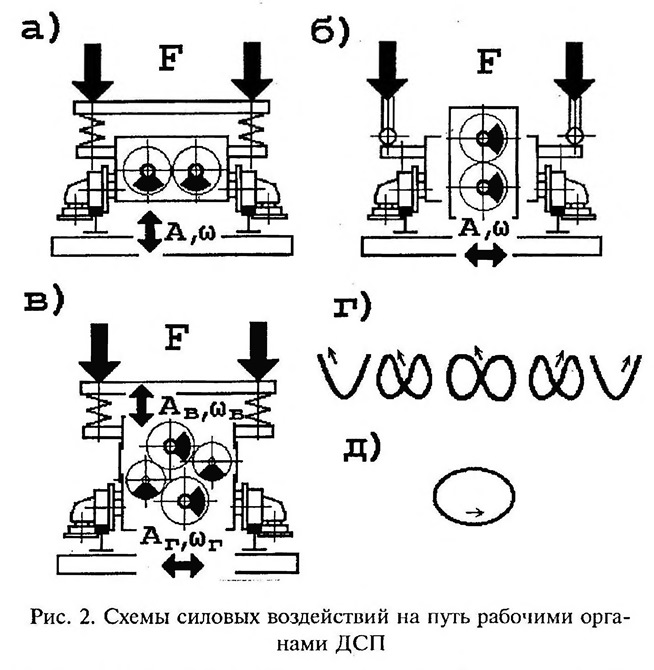
ДСП с таким рабочим органом хорошо имитирует воздействие на путь проходящего поезда, когда под колесами путевая решетка прогибается, а под пролетными частями подвижного состава приподнимается.
В схеме на рис. 2,6 на балластный слой через путевую решетку передаются горизонтальные виброколебания, сочетающиеся с вертикальным прижимом. Такая схема не позволяет реализовать отрывный режим воздействия штампа с балластным слоем, а значит и нельзя достигнуть в течение периода колебаний разгрузок слоя балласта и относительных пассивных смещений частиц. При таком характере силового воздействия наблюдаются движения частиц балласта к торцам шпал у прилегающих слоев, а вертикальная составляющая вибросмещений появляется только на глубине 0,5—0,7 м.
Схема силового воздействия, показано на рис. 2,в, применяется в упоминавшемся ДСП. Каждый виброблок реализует горизонтальную составляющую колебаний, которая сочетается с вертикальной. Частоты колебаний в горизонтальной и вертикальной плоскостях находятся в кратном отношении, отчего траектории виброперемещений в вертикальной поперечной плоскости имеют вид фигур Лиссажу (рис. 2,г,д). При соотношении частот горизонтальной и вертикальной составляющих 1:2 получается горизонтальная «восьмерка», которая в зависимости от соотношения фаз колебаний может выродиться в седлообразную фигуру (см. рис. 2,г). Если соотношение частот горизонтальной и вертикальной составляющих 1:1 (см. рис. 2,д), то получается фигура Лиссажу в виде эллипса, вытянутого горизонтально (амплитуда горизонтальных колебаний больше) либо вертикально (амплитуда вертикальных колебаний больше).
При рациональном выборе параметров схема на рис. 2,в сочетает преимущества схем а и б. С одной стороны, обеспечивается эффективный отрывной виброударный режим взаимодействия штампа с балластом, а с другой — вспомогательные горизонтальные вибросмещения частиц способствуют их лучшему уплотнению.
Виброблоки 5 (см. рис. 1,а) ДСП, работающего по схеме в (см. рис. 2), соединены между собой карданными валами так, что соответственные дебалансы каждого блока последовательно вдоль машины повернуты на угол смещения фаз колебаний. Схема позволяет получить эффект бегущей вперед вдоль пути упругой волны колебаний путевой решетки, что имитирует поездную нагрузку. Таким образом балластный слой лучше уплотняется.
Более длинная зона силового воздействия, создаваемая тремя виброблоками и распространяемая бегущей волной, обусловливает сглаживание пути и уплотнение его на Нос. Поэтому рабочий проход даже без использования специальной контрольно-измерительной системы способствует более плавной установке пути по уровню.
На Октябрьской дороге в ПМС и дистанциях пути последние два года эксплуатируют несколько ДСП, сконструированные ЦКБпутьмаш. Значительный вклад в освоение новой машины внесли работники ПМС-88 (станция Рябово). Они периодически устраивали комиссионные испытания с участием представителей дороги, ЦКБпутьмаш, Екатеринбургского филиала ГУП «Ремпутьмаш», ВНИТИ, ВНИИЖТа, ПТКБ путейского главка. Проводились неоднократные испытания ДСП № 004 на главном ходу Москва—Санкт-Петербург. Стабилизатор пропускали после глубокой очистки щебня машиной СЧ-600 и выправки пути ВПО-ЗООО,
Оказалось, что при рабочих скоростях (приблизительно 1 — 1,1 км/ч) ДСП обеспечил среднюю осадку 30,2 мм. При этом не наблюдалось увеличения ширины колеи (благодаря специальным калибровочным устройствам), а происходило наоборот, сужение в среднем на 1 мм. Стабилизатор практически не меняет положение пути по уровню, оставляя первоначальное после работы ВПО-ЗООО возвышение полевой нити. На ДСП № 004 установлен дизель мощностью 230 кВт, поэтому на 1 мм осадки потребовалось 7,6 кВт мощности, а это меньше в 2—2,5 раза, чем при использовании аналогичных зарубежных машин.
Отмеченные преимущества свидетельствуют о технико-экономической целесообразности ДСП с рабочими органами, которые горизонтальную составляющую вибрирования сочетают с вертикальной, что позволяет использовать эффективный виброударный режим уплотнения с периодическим разгружением балласта для лучшего уплотнения частиц. И это подтвердила практика эксплуатации ДСП.
Однако отечественные ДСП необходимо совершенствовать дальше, и помимо решения проблем оптимального выбора параметров рабочих органов, надежности, эргономичности, экологичности следует использовать более мощные микропроцессоры для внедрения системы управления и контроля геометрии пути во время работы машины и при измерительных проездах. Требуется установить четкую систему оценки уплотненного состояния балластной призмы.
На дорогах Западной Европы применяют механизированные комплекты машин (MDZ), которые после глубокой очистки балласта выправляют колею с подбивкой выправочно-подбивочно-рихтовочными машинами, выравнивают балластную призму самоходными планировщиками и стабилизируют путь ДСП. Опыт использования комплектов показывает, что для пропуска высокоскоростных поездов требуется минимально трехкратный проход выправочно-под-бивочно-рихтовочных, планировочных машин, а также динамических стабилизаторов пути.
Поэтому и при работе отечественных ДСП совместно с машинами для глубокой очистки щебня целесообразно выполнять минимум два-три прохода: грубая стабилизация сразу после пропуска ЩОМ и вып-равочной машины и чистовая — после балластоуплотнительной (БУМ), планировщика (ПБГ) и выпра-вочно-подбивочно-рихтовочной машины.
Накопленный опыт и традиции создания современных уплотнительных путевых машин позволяет в будущем решить задачи оснащения парка путевых машин отечественной техникой.
Источник
Динамические стабилизаторы пути ДСП, МДС
Идея имитации уплотняющего воздействия поездной нагрузки машиной впервые была высказана отечественными учеными в 40-х годах прошлого века, а затем в 50-е годы ВНИИЖТ провел серию экспериментов, подтвердивших технико-экономическую целесообразность такого способа уплотнения. Доказано, что при наличии вертикальной составляющей вибрирования достигается более эффективное стабилизирующее воздействие при меньшей энергоемкости (в 1,25 – 1,3 раза). В 70-е годы австрийской фирмой Plasser & Theurer освоен выпуск динамических стабилизаторов DGS-62N. Рабочими органами динамической стабилизации пути оснащаются многие современные путевые машины. Екатеринбургским ремонтно-механическим заводом по проекту ЦКБпутьмаш в 80-х годах освоен серийный выпуск отечественных динамических стабилизаторов пути, превосходящих по своим параметрам лучшие зарубежные образцы. Этот тип машин постоянно совершенствуется. Накоплен большой опыт их эксплуатации на железных дорогах [31, 64, 77, 83].
10.11.1. Устройство и принцип действия динамических стабилизаторов пути
Динамический стабилизатор пути (ДСП) это машина, предназначенная для ускоренной и контролируемой стабилизации балластного слоя с сохранением в пределах установленных допусков и норм содержания положения РШР в продольном профиле, по уровню и в плане. Он используется в комплексах по выполнению финишных отделочных работ, включая работы после глубокой очистки балластного слоя [8, 57, 77, 83]. ДСП производит искусственное осаждение РШР под воздействием передаваемых через нее вибраций в сочетании с вертикальным прижимом.
В путевом хозяйстве применяются динамические стабилизаторы пути серий ДСП, ДСП-С (в т.ч. модификаций ДСП-С4 и ДСП-С6), МДС. Технические характеристики динамических стабилизаторов приведены в табл.10.2.
Динамический стабилизатор пути серии ДСП-С (рис. 10.74) имеет экипажную часть в виде рамы 2, опирающейся на переднюю тяговую 8 и заднюю бегунковую 15 ходовые тележки. На раме установлен силовой дизельный агрегат 3 с трансмиссией 9, унифицированной с машинами ВПР, устройства гидропривода, тормозная система, автосцепки 5, сигнальные устройства и устройства системы безопасности движения КЛУБ-УП. Основным рабочим органом машины является блок динамической стабилизации пути 14. Положение рельсовых нитей пути в продольном профиле и по уровню контролируется двухтросовой КИС, стрелографы которой выполнены по трехточечной схеме измерения. КИС включает переднюю тележку 6 с установленным на ней датчиком пути 7, измерительное устройство 10 с двумя датчиками продольного профиля 11 и заднюю тележку 16 с маятниковым датчиком уровня. На тележках монтируются стойки, между которыми натягиваются нивелировочные измерительные тросы 13.
Машина может дополнительно оснащаться КИС для контроля параметров положения пути в плане с базовой трос-хордой 12, натянутой между тележками 6 и 16. В этом случае на измерительном устройстве 10 дополнительно устанавливается датчик стрелы изгиба пути в плане.
Управление машиной в рабочем и транспортном режимах производится из кабин 1 и 4, в зависимости от направления движения.
В транспортном режиме привод на колесные пары тяговой тележки осуществляется, в зависимости от модификации машины, через механическую или гидромеханическую трансмиссию. В рабочем режиме колесные пары машины приводятся от гидромотора. Ходовые тележки ДСП унифицированы с тележками машин ВПР, имеющих специальный диаметр колесных пар по кругу катания Æ710 мм.
В настоящее время освоен выпуск машины для динамической стабилизации пути МДС (рис. 10.75). Модернизации в основном подверглась экипажная часть машины – применены ходовые тележки бесчелюстной конструкции с увеличенным диаметром колес по кругу катания. Для более удобного реверсирования рабочего направления движения применены два измерительных устройства: переднее 8 и заднее 12. Стабилизатор дополнительно оснащен гибкой автоматизированной системой регулирования прижима виброблоков в зависимости от текущих осадок правой и левой рельсовых нитей. Регулируется рабочее давление в пневматических камерах соединения виброблоков и общей рамы. Применен более совершенный гидропривод рабочего органа и передвижения машины. Помимо автоматизированной системы контроля продольного профиля и уровня машина оснащена автоматизированной системой диагностики состояния во время работы основных узлов и систем.
Силовая передача МДС (рис. 10.76) включает реверсивную трехступенчатую гидромеханическую передачу импа T211 r.3 фирмы Voith (ФРГ) 7, которая через карданный вал связана с коробкой отбора мощности 4. Внутри коробка имеет зубчатую муфту 5 включения отбора мощности насосов 2 и 3, а также зубчатую муфту 23, включаемую в транспортном режиме передвижения машин. В рабочем режиме муфта 23 размыкается, а шестерня 24 входит в зацепление с зубчатым колесом. Вращение выходного вала коробки в этом случае передается от гидромотора 22 рабочего передвижения машины. Коробка 4 через карданный вал 21 связана с редуктором 19, имеющим дополнительно зубчатую муфту 20, отключаемую в режиме буксировки машины локомотивом или в составе поезда. Вращение от редуктора 19 передается через карданные валы 18 и 15 на осевые редукторы 16 и 13. Конструкции передней и задней тележек 17 одинаковы. В рабочем режиме задняя ходовая тележка получает привод на колесные пары 14 через редуктор рабочего хода 27, у которого включена зубчатая муфта 29, от гидромотора 28. В транспортном режиме, чтобы исключить заклинивание колесных пар, муфта 29 отключается. Масло в контуре охлаждения гидротрансформатора гидропередачи 7 циркулирует через воздушный маслоохладитель 1 с приводом вентилятора от гидромотора 30.
Конструкция и принцип действия рабочего оборудования в основном аналогичны стабилизатору ДСП-С.
Блок динамической стабилизации пути (рис. 10.77) содержит промежуточную раму 5, на которой через кронштейны 3 и пневмокамеры 2 установлены последовательно расположенные блоки 10, 13 и 16. Подъем в транспортное положение, опускание в рабочее положение и вертикальный прижим рамы с виброблоками к путевой решетке производится четырьмя гидроцилиндрами 4. Крепление промежуточной рамы в транспортном положении обеспечивается крюковыми захватами 17. Возникающие сопротивления движению блока динамической стабилизации воспринимаются тягами 7, 8. Тяги через универсальные шарнирные узлы соединяют раму и виброблоки с рамой машины 1. Винтовыми стяжками 1 производится регулировка продольного положения виброблоков относительно рамы 5.
Каждый виброблок имеет систему ребордчатых роликов и роликовых захватов, гарантирующих надежное удержание РШР при передаче вибраций. Во время работы виброблоки катятся по рельсам роликами 14. С внешней стороны головок рельсы одновременно захватываются роликовыми клещевыми захватами 15, которые приводятся гидроцилиндрами 20. Прижим роликов ребордами к головкам рельсов производится гидроцилиндрами 19. Параметры гидроцилиндров выбраны таким образом, что при закрытии захватов силы, действующие на головку рельса, уравновешены. Это позволяет при изменениях ширины колеи во время работы в кривых эффективно передавать вибрации на путевую решетку.
На каждом виброблоке установлен четырехдебалансный вибратор 18, позволяющий генерировать согласованные направленные вертикально и горизонтально вибрации, причем частота вертикальных вибраций в два раза выше частоты горизонтальных вибраций. Привод вибраций осуществляется от двух аксиально-поршневых гидромторов 6 через карданные валы 9, 12, соединяющие ведущие валы вибраторов и валы гидромторов.
Чтобы обеспечить соотношение частот горизонтальных и вертикальных вибраций wг // wв = 1 / 2 (рис. 10.78), соотношение числа зубьев колес 5 и 3 выбрано 2 / 1. Зубчатые колеса 5 синхронизируют вращение валов дебалансов 6 горизонтальных вибраций, а также ускоренного в два раза вращения дебалансов 4 вертикальных вибраций. Такое сочетание частот позволяет обеспечить формы траекторий колебаний путевой решетки в поперечной плоскости в виде фигур Лиссажу. Крайние траектории соответствуют вырожденным фигурам. Соотношения фаз колебаний блоков и путевой решетки в горизонтальной и вертикальной плоскостях выбрано таким образом, чтобы получить вырожденные траектории колебаний, соответствующие наиболее эффективному уплотнению балласта. На рисунке показаны положения дебалансов со сдвигом по фазам колебаний последовательно в одну строну: горизонтальных на p / 4, а вертикальных на p / 2. Это позволяет получить продольные формы колебаний путевой решетки в вертикальной плоскости, приближающиеся к получаемым при воздействии движущегося поезда, т.е. в виде бегущей волны, позволяющей чередовать нагружения и разгрузки слоя с большой частотой (скорость бегущей волны в м/с определяется по известной формуле vб = lб f, где lб – длина волны, м; f – частота колебаний, Гц). В балласте происходят динамические процессы, аналогичные воздействию поездной нагрузки. Балластный слоя под шпалами эффективно уплотняется, путь приобретает свойства стабильности по отношению к нагрузке от поездов.
Для контроля геометрического положения рельсовых нитей в процессе работы и в измерительных проездах ДСП оснащаются КИС (рис. 10.79). Их принцип работы аналогичен КИС машин класса ВПР: используется трехточечная схема измерения стрел изгиба пути в продольном профиле по правому и левому рельсам с измерением относительного положения рельсовых нитей по уровню (двухкоординатная КИС). Вырабатываемые сигналы управления используются для автоматического регулирования усилия прижима рабочего органа по правому и левому рельсам, что дает возможность управлять осадками пути.
Измерение положения правой и левой рельсовых нитей в продольном профиле производится относительно правого 1 и левого 2 тросов-хорд, закрепленных на стойках 3 передней измерительной тележки 4 и стойках 16 задней измерительной тележки 14. При работе тележки вертикально прижимаются к рельсам пневмоцилиндрами для их подъема в транспортное и опускания в рабочее положения (не показаны). Натяжение хорд производится пневматическими цилиндрами 15, которые соединяются штоками с соответствующими трос-хордами, а корпусами закрепляются на задних стойках 16. Потенциометрическими датчиками продольного профиля 9 измеряются стрелы изгиба относительно тросов-хорд. Датчики устанавливаются на стойках 8, связанных с измерительными тележками 7, 12. В зависимости от направления движения, в работу включается одна из указанных тележек. Контроль положения рельсовых нитей по уровню производится датчиком уровня 17, расположенным на задней тележке 14. Координатная привязка к положению пути в точках сканирования датчиков осуществляется импульсным датчиком 5, который связан с измерительным колесом. В зависимости от конструктивного исполнения, датчик за один оборот вырабатывает от 5 до 20 импульсов на сканирование.
Машина оснащается аппаратно-программным комплексом «ЭСКОРТ-4100», разработанное НПФ «Электронные системы управления и приборы» (ООО НПФ «ЭСУП», г. Санкт-Петербург). Комплекс в зависимости от направления движения позволяет работать из передней и задней кабин управления, так как содержит две равнозначных по функциям контроля и управления группы блоков «ЭСКОРТ-4100.1» и «ЭСКОРТ-4100.2». Группа, в свою очередь, состоит из блока индикации КИС контроля положения пути 18, 20 и блока диагностики и клавиатуры 19, 21.
Комплекс обеспечивает: получение и сохранение измерительной информации о продольном профиле и осадках рельсов; автоматическое или полуавтоматическое управление давлением воздуха в пневматических амортизаторах виброблоков; диагностический контроль параметров рабочего режима узлов и систем машины. Данные о геометрическом положении пути с привязкой к расположению пикетных и километровых столбов записываются в виде стрел изгиба в продольном профиле, измеренных относительно хорд 1, 2 датчиками 9 (диапазон измерений ± 50 мм на длине хорды 18 м), данных о положении пути по уровню, измеренных маятниковым датчиком 17 (диапазон измерений ± 200 мм), расчетные значения осадок а также перекосов на базе до 20 м.
Контроль параметров геометрии пути может производиться в измерительном проезде и рабочем проходе. Длина каждого проезда должна составлять не более 10 км. Дискретность измерений пройденного пути составляет 1 м. Результаты измерений записываются в энергонезависимую память и могут отражаться на дисплеях блоков 18, 20.
Программно-аппаратный комплекс позволяет производить работу в следующих режимах: основной режим сбора и отображения информации датчиков с записью; режим индикации осадки по данным предварительного проезда; режим просмотра результатов измерений и записи; режим настройки каналов и установки пределов измерений; режим ввода констант – геометрических параметров КИС и пределов датчиков измерения продольного профиля и уровня; режим установки даты и времени; режим выбора масштабов графиков отображения информации; режим обмена информацией с автономным накопителем; режим тестирования устройства по запросу оператора; режим тестирования устройства; режим тестирования автономного накопителя; режим тестирования работоспособности датчиков и кабелей. Во всех режимах на экране отображается соответствующая информация в виде записей и графиков, позволяющая работать в интерактивном режиме с вводом необходимых данных через систему экранных меню и клавиатуру. Кроме того, на лицевых панелях блоков управления 18 … 21 имеются светодиоды индикации включения питания, возникновения отказов в системе и предупреждений.
При работе ДСП-С и МДС система позволяет произвести измерительные операции по контролю положения рельсовых нитей до и после рабочего прохода машины, а также в процессе работы осуществить оперативный контроль, получать визуальную информацию для принятия решений по управлению режимом работы машины, контролировать качество произведенной работы по стабилизации пути, а также реагировать на появление сообщений об ошибках. В рабочем режиме производятся измерения положения правой и левой рельсовых нитей в продольном профиле и по уровню с расчетом перекосов.
Для оценки осадки пути после работы ДСП-С или МДС необходимо производить два проезда: один измерительный, а второй – рабочий проход машины. При этом в измерительном проезде записываются стрелы изгиба пути h2иi, (рис.10.80, а) а в рабочем проходе – стрелы изгиба h2рi (рис. 10.80, б). Таким образом, в измерительном проезде косвенно записывается искривленная линия, характеризующая положение рельсовой нити до работы, служащая своеобразной базой для отсчета осадок стабилизации. В рабочем проезде принято допущение, что при стабилизации балластного слоя исходные неровности относительно большой длины не выправляются, так как выправка пути производится выправочно-подбивочной машиной. Кроме того, принимается, что измерительные точки 1 и 2 находятся на не выправленном пути. Поэтому стрела изгиба h2рi, записываемая в рабочем проходе, содержит в себе информацию об исходном положении пути и о положении пути после работы ДСП. Это позволяет оценить текущее значение осадки пути в точке 3 хорды, имея информацию стрелах изгиба в точке 2 по формуле, мм:
где a, b – плечи измерительной хорды, мм.
Соотношение n = (a + b) / b – постоянный для КИС коэффициент, который заводится в режиме ввода констант. Для ДСП-С n
3,5, для МДС при движении вперед n
3,4, а при движении назад n
Измерения продольного профиля производятся на правой и левой рельсовых нитям, поэтому вычисляется оценка общей осадки пути путем усреднения измеренных осадок, мм:

где S3лi, S3пi – стабилизационные осадки левого и правого рельсов в i-й точке сканирования датчиков, мм.
Программой также предусмотрена отдельная оценка осадок правой и левой рельсовых нитей. При первичной статистической обработке данных измерений определяется средняя глобальная осадка на участке работ фронтом до 10 км.
10.11.2. Уплотнение балластного основания рабочим
органом динамического стабилизатора пути
Отдельно взятый виброблок ДСП совершает синусоидальные колебательные движения в горизонтальной и вертикальной плоскостях, причем частота вертикальных колебаний ωв = 2ω, рад/с, в 2 раза превышает частоту горизонтальных колебаний ωг= ω, рад/с, а вертикальные колебания отстают по их расчетной начальной фазе на угол π/2 от горизонтальных колебаний. Это эквивалентно опережению по начальной фазе горизонтальных колебаний на π/4 по отношению к вертикальным колебаниям. Результирующая траектория вибрационного движения подошвы шпалы в поперечной плоскости представляет собой вырожденную седлообразную фигуру Лиссажу. Одновременно производится погружение шпалы в балластный слой, поэтому на колебательные движения накладывается постоянное смещение подошвы шпалы вниз со скоростью подачи Vп,.
Рассмотрим качественный характер процессов, происходящих при внедрении шпалы в балластный слой (рис. 10.81).
При уплотнении происходит виброударное взаимодействие подошвы шпалы с уплотняемым балластом. Особенностью процесса является то, что в течение цикла горизонтальных колебаний сначала происходит косой удар справа – налево (б), а затем косой удар слева – направо (в). При отрывном режиме взаимодействия (а) поверхность шпалы в точке 1 ударяет по поверхности балласта, после чего балласт обжимается в вертикальном направлении на величину Sв(1-2) до точки 2. В этой точке имеет место отрыв поверхности шпалы от балласта, после чего происходит упругая отдача балласта вверх. После прохода крайней точки 3 траектории шпала движется вниз до удара в точке 4 с балластом. Происходит обжим балласта до точки 5 на величину Sв(4-5), после которой шпала снова отрывается от балласта.
Одновременно с вертикальным обжимом подошва шпалы смещается сначала влево на величину Sг(1-2), а затем вправо на величину Sг(4-5). При смещении шпалы в контакте подошвы и балласта возникает сила нормального давления Pн, а также сила трения Pтр (см. рис. 10.81, б, в). При вибрационном смещении шпалы влево сила трения, воздействующая на балласт, направлена влево, а при смещении вправо – вправо. Результирующая сила воздействия P, направлена под углом трения φтр, к силе нормального давления. Сила трения Pтр совершает работу на участках горизонтальных перемещений Sг(1-2) и Sг(4-5), а сила нормального давления Pн – на участках вертикальных перемещений Sв(1-2) и Sв(4-5). При расчете захватываемого вибрационным воздействием объема необходимо учитывать угол передачи давления в щебеночном балласте aп.
Амплитуды Aг и Aв горизонтальной и вертикальной составляющих колебаний шпалы определяются из анализа динамических колебательных систем «виброблок – путь». Используя принцип суперпозиции общую колебательную систему можно разложить на две отдельных подсистемы – со смещениями составляющих масс в горизонтальном и вертикальном направлениях. Модели, в которых рассматривается одна масса виброблока и пути, дают сильно заниженные значения амплитуд. В них не учитываются вертикальные и горизонтальные упругие связи рельсовых скреплений, упругость балластного слоя и сниженная поперечная упругость пути в целом. Для учета этих факторов необходимо анализировать сложные многомассные колебательные схемы.
Источник